




Система управления параметром состояния безопасной эксплуатации судна рассматривается как объект управления в эргатической системе. Изучается поведение этого объекта в контуре управления эргатической системы. Даются условия перехода контура управления из режима ручного управления в режим автоматического управления и, наоборот, при появлении существенных как внутренних, так и внешних угроз.
Ключевые слова: эргатическая система, внешние угрозы, функция переходов.
1. Введение
Проблема аварийности морских и промысловых судов остается актуальной, несмотря на внедрение новейших технических средств судовождения и совершенствования подготовки экипажей судов. [1].Как следует из этого литературного источника, самыми распространёнными являются навигационные аварии. Большинство происшествий происходит при плавании в стеснённых водах (плавания в узкостях, постановка судов к причалам, маневрирование судов при расхождении). Отсутствие должного планирования рейса, требуемого международными и национальными нормативными документами, неиспользование технических средств судовождения в полной мере, а также грубые ошибки, допускаемые человеческим элементом социотехнической системы несения вахты на судне, составляют основные факторы, характеризующие навигационные происшествия. Поэтому проблема оптимального согласования «человеческого» и «технического» элемента, например системы оптимального управления параметром состояния безопасности судна, объединенных в единую эргатическую систему управления, учитывающую условия безопасности мореплавания и безопасности эксплуатации судов является актуальной задачей, не имеющей до настоящего времени какого-либо удовлетворительного решения. Основная трудность согласования человеческого и технического звеньев в таких эргатических системах управления в первую очередь связана с отсутствием адекватного математического описания судового специалиста, который в зависимости от поступающей ему информации может выполнять двоякую роль и быть как управляющим звеном, так и контролирующим звеном [2].
2. Контур управления эргатической судовой системы «техническое средство — человеческий элемент»
Представим эргатическую систему W, (рис.1) в которой судовой специалист в зависимости от текущего состояния безопасной эксплуатации судна может непосредственно участвовать как в ручном управлении, так и контролировать автоматическое функционирование технического средства, например, системы управления одним из параметров состояния безопасной эксплуатации судна заданной следующей блок-схемой рис. 1.
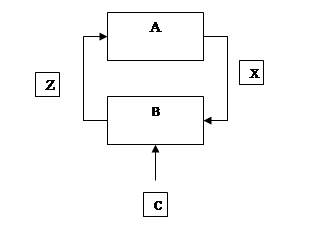
Рис. 1.
Пусть в рассматриваемой эргатической системе W, элемент А является оптимальной системой управления одним из параметров состояния безопасности судна, которую можно задать следующей структурой:
А = <Z, X, А, dаlа>, (1)
где dа: А × Z → 2А — функция входа, а lа: А→ X — функция выхода этой системы.
При этом форма представления функции dа имеет место лишь в случае недетерминированности системы управления параметром безопасности судна, так как, находясь в некотором состоянии аÎА и получив на входе команду zÎZ, такая система может перейти в одно из состояний некоторого множества А'ÍА, т. е.
dа(а, z) = А'.
Кроме того следует учитывать то, что недетерминированность поведения системы А в контуре управления эргатической системой S будет иметь место только по переходам, а по выходам эта система А всегда будет характеризоваться детерминированным поведением. Если далее положить, что если для эргатической системы W существует детерминированный по парам «вход-выход» системы А, причем все начальные состояния которой имеют различные выходы, причем такие, что L(W) = L(А), где L(·) — поведение эргатической системы. Тогда оптимальная система управления параметром безопасности судна из состава эргатической системы (рис.1) будет детерминирована по парам «вход — выход», если не существуют аi, аj, аk, z, такие, что одновременно
аj, аk, Î dа(аi, z); lа(аj) = lа(аk)
причем аj ¹аk
Пусть далее в эргатической системе W задан судовой специалист, который, принимая во внимание специфические требования Международной морской конвенции ПДНВ — 78/95, и Концепцию «человеческого элемента» задан в виде структуры, записанной так
В = <С × X, Z, В, dвlв>, (2)
где dв: В × С × Х ® В; lв: В®Z — входная и выходная функция «человеческого элемента», а С — информация (множество команд), поступившая этому элементу из окружающей среды и определяющая текущее состояние безопасной эксплуатации судна или пути повышения уровня безопасности.
Тогда, взаимодействуя в эргатической системы W, два элемента (1) и (2) образуют контур управления S, состояниями которого могут служить пары s = {а, в}, где аÎ А, вÎВ, причем множеством входов в этот контур управления является множество сообщений С, поступающих «человеческому элементу» от технических средств и окружающей среды.
При построении функции переходов контура управления S эргатической системы W будем учитывать ограничения, которые наложим на процесс взаимодействий системы А и «человеческого элемента» В (судового специалиста), которые вполне согласуются с обычными техническими допущениями об относительном быстродействии элементов системы W на складывающиеся внутренние и внешние угрозы состоянию безопасности судна. Пусть реакция «человеческого элемента» на внешние и внутренние угрозы состоянию безопасности судна обладает существенным преимуществом по отношению к реакции системы оптимального управления параметром состояния безопасной эксплуатации судна. Тогда, учитывая существующее преимущественное быстродействие, можно принять, что в контуре управления S эргатической системы W существует такое состоянии s = {а, в}, для которого одновременно выполняются два следующих условия
dа(а, lв(в)) = а' ¹ а; dв(в,(с,lа(а)))= в' ¹ в,
и которые в принципе допускают существование равенства
s' = D(s, с) = (а, в'),
где D(s, с) — функция переходов контура управления эргатической системы W.
Поэтому состояние системы оптимального управления, включенной в эрготическую систему (рис.1) при реализации технологического процесса и изменении состояний внешних и внутренних угроз должно обязано переключаться или в автоматический подконтрольный режим или в режим ручного управления лишь после того как судовой специалист примет окончательное решение определяемое функцией входа вида
dв(в,(с,lа(а)))= в.
Тогда функция переходов D контура управления эргатической системы S может быть представлена функцией вида D: S × C ® S, причем такой, что

Таким образом, поведение L контура управления S эргатической системыW может быть описано с помощью структуры представленной так
L = <C, S, D>. (3)
Управление системой оптимального управления параметром состояния безопасной эксплуатации судна А в эргатической системе W заключается в принудительной реализации нужного множества входных-выходных последовательностей, которое, очевидно, допускается системой А. Именно с этой целью система А и включается в контур управления эргатической системы W.
Далее под поведением системы управления параметром состояния безопасности судна А в контуре управления L эргатической системы W будем понимать множество всех входных и выходных последовательностей вида
L(А) Í(Z×X)
которые реализуются на множестве А из подмножества начальных состояний А0ÍА.
Сформулированное таким образом представление о поведение оптимальной системы управления, включённой в контур рассматриваемой эргатической системы (рис.1) можно представлять, как некое множество L всех реализуемых общностей входных и выходных последовательностей. Чаще всего на промысловых и транспортных суднах е в эргатических системах W реализуется не все множество L, а только некоторое его подмножество L', которое можно назвать управляемым поведением системы А.
3. Поведение технического средства в контуре управления эргатической судовой системы
Если далее исходить из того, что элементы А и В в системе W заданы, то можно зафиксировать необходимое «поведение» L' системы А в контуре управления этой системы. Здесь следует напомнить, что под «поведением» L' следует понимать множество входных-выходных последовательностей, реализуемых элементом А в контуре управления S эргатической системы W. Очевидно, что «поведение» реализуемое системой А в контуре управления системы W должно быть гомоморфным «поведению» некоторой подсистемы из множества систем А. Для этого из определения достаточно чтобы существовала функция h: А1 ®А2, которая для всякого а'ÎА1 будет ставить в соответствие а''ÎА2 причем таким образом, чтобы отношение а'' = h(а') при каждом а'' Î А2 будет являться хотя бы образом а'Î А1. Кроме того, функция h: А1 ®А2 должна сохранять функцию переходов и выходов или другими словами: для всякого аÎА1 и z Î Z таких, что dа(а,z)¹Ø должны иметь место отношения
dА,2 (h(а), z) = h(dА,1(а,, z)),
lА1(а) = lА2(h(а)).
Следовательно, определение «поведения» системы А в контуре управления S системы W как гомоморфного «поведению» некоторой подсистемы из множества систем А позволяет конкретизировать множество L для системыА, задав в нем подмножество L', отвечающее, например, поведению систем автоматического регулирования, которые являются неотъемлемой частью большинства судовых технических средств, поддерживающих безопасное состояние эксплуатации судна.
Если для системы А фиксировано подмножество поведения L', то появляется возможность лингвистически описать основные элементы поведения «человеческого элемента», представленного структурой (2) и включенного в эргатическую систему W как орган переключения режимов этой системы.
Пусть далее система А функционируя в контуре управления S эргатической системы W так, что выполняются следующие два условия:
- еслиаj Î dА(аi, z') и аk ÎdА(аi, z'') то при заданных аi, аj, аk, z', z'', следует
z' = z''; (4)
- если аjÎ dА(аi, z) и аj ¹аi то при заданных аi, аj, z, следует lА(аj) ¹lА(аi) (5)
Одновременное выполнение этих условий позволяет сформулировать функцию переходов контура управления эрготической системы W в лингвистическом виде. Так при переходе от режима автоматического управления параметром состояния безопасной эксплуатации судна, к режиму ручного управления судовой специалист должен лишь дать команду «останов» и полностью «забыть» о существовании системы автоматического режима управления, концентрируя свое внимание на ручном регулировании параметра состояния безопасности судна. Такое поведение человеческого элемента вытекает из того факта, что оба условия (4), (5) будут для такого перехода будут выполняться. Если же в процессе поддержания состояния безопасной эксплуатации судна возникает необходимость в переводе системы из ручного режима управления в автоматический режим управления, то, очевидно, условие (4) не всегда может быть соблюдено. Следовательно, в данном случае функция переходов контура управления S в системе W должна отвечать лингвистическому правилу, записанному так — судовой специалист должен лишь дать команду на включение системы А и далее акцентировать свое внимание на контроле и последующих дополнительных регулировках, если это необходимо.
Выделим причину, по которой судовой специалист должен руководствоваться выше сформулированной функцией перехода контура управления при переходе от ручного режима управления к автоматическому режиму в эргатической систем W. Для этого несколько упростим условие (4), записав его с учетом множества поступающих человеческому элементу сообщений из внешней среды так — если аj Î dА(аi,(с', z')), аk ÎdА(аi,(с'', z'') и аj ¹аk то при заданных аi, аj, аk, с', с'', z', z'', следует, что с' = с'' Û z' = z', причем с', с''ÎC. Очевидно, что это условие определяет состояние управляемости системы А в контуре S эргатической системы W. Тогда фиксируя состояние наблюдаемости системы А информацией содержащейся в множестве сообщений С × X можно сделать вывод, что основной причиной, которая обуславливает обязательное наличие «человеческого элемента» в контуре управления S эргатической системы W является двойственность состояния управляемости в этом контуре.
4. Заключение
Приведенное исследование показывает, что функция переходов контура управления эргатической системы, включающей техническое средство и обеспечивающее безопасную эксплуатацию судна, зависит от двойственности состояния управляемости этого контура.
Двойственность состояния управляемости контура в эргатической системе при условии постоянных внутренних или внешних угроз не позволяет эксплуатировать такие системы без участия «человеческого элемента» в режиме полной автоматизации.
Современные судовые технические средства при использовании в них вычислительной техники позволят учесть двойственность состояния управляемости контуров эргатических систем лишь в том случае, если будут являться экспертными системами.
Литература:
1. Гладышевский, М. А. Организационно-технические структуры, обеспечивающие безопасную эксплуатацию судна / М. А. Гладышевский, М. А. Пасечников, К. В. Пеньковская; под общ. ред. В. И. Меньшикова. — Мурманск: Изд-во МГТУ, 2008. — 212 с.
2. Меньшиков В. И Элементы теории управления безопасностью судоходства / Меньшиков В. И., Глущенко В. М., Анисимов А. Н. — Мурманск: Изд-во МГТУ, 2000. — 242 с.
3. Кукуи Ф. Д. Основные процессы в структурах безопасной эксплуатации судна / Ф. Д. Кукуи, Н. А. Анисимов, А. А. Анисимов; под общ ред. В. И. Меньшикова. — Мурманск: Изд-во МГТУ, 2008. — 185 с.
4. Эксплуатация добывающего судна в навигационно-промысловых структурах / А. Н. Анисимов, В. И. Меньшиков, В. Я. Сарлаев; под общ. ред. В. И. Меньшикова. — Мурманск: Изд-во МГТУ, 2009. 175 с.
5. Оптимизация социотехнических связей в структурах мореплавания / М. М. Еремин, В. И. Меньшиков, К. В. Пеньковская; под общ. ред. В. И. Меньшикова. — Мурманск: Изд-во МГТУ, 2011. — 166 с.
