




Водозаборные сооружения (водозабор) — это сложный гидротехнический комплекс, который служит для [1]:
- обеспечения надёжного забора расчётного количества воды и подачу ее потребителю;
- защиты системы водоснабжения от попадания в неё грязи, мусора, льда и т. п.
Водозабор — это комплекс сооружений, включающий водоприемник, оборудование предварительной очистки (решетки, сетки), насосную станцию первого подъема [2]. Процесс водоподачи является непрерывным, так как потребитель в любой точке водораспределительной сети должны иметь возможность получить воду открыв кран. Это достигается путем поддержания постоянного давления в диктующей точке этой сети независимо от разбора воды в ней. Поэтому основной задачей системы управления здесь является поддержание определенного давления с помощью насосного агрегата, уровня в накопительных резервуарах насосной станции путем изменения количества работающих скважин, а также система должна производить мониторинг состояния оборудования каждой скважины и являться элементом системы автоматизации верхнего уровня.
Одним из определяющих требований к автоматизированной системе управления (АСУ) насосной станции первого подъема является требование сохранения управляемости насосным агрегатом при кратковременных провалах напряжения. В этом случае целью управления является сохранение вращения насосного агрегата – «удержание» двигателя. При этом, критериями эффективности работы насосной станцией являются: возможности и ограничения «удержания» насосного агрегата по времени, скорость возвращения в исходный режим работы насоса преобразователем частоты, отсутствие резких изменений в состоянии насосного агрегата (что, как правило, позволяет избежать гидравлических ударов в системе).
В основе сохранения вращения насосного агрегата находится идея об использовании энергии объекта управления [3]. Насосный агрегат обладает инерцией, что позволяет запастись некоторым количеством реактивной энергии. Кроме того, переходные процессы запуска или торможения насосного агрегата обусловлены процессами накопления и рассеяния реактивной энергии. Скорость протекания таких процессов определяется эффективной разницей между силами действия и противодействия. При этом скорость обмена реактивной энергией соответствует мгновенной мощности прикладываемой к насосному агрегату или забираемой от него. С учетом этого, возможно использовать энергию торможения насосного агрегата. Длительность процесса сохранения вращения насосного агрегата прямо пропорциональна инерции объекта управления и обратно пропорциональна мощности потерь в насосном агрегате.
При входе в режим «удержания» двигателя и выходе из него необходимо контролировать величину напряжения сети. Для преобразователей частоты такой контроль целесообразно производить с помощью измерения напряжения звена постоянного тока  . При этом, порог питающего напряжения
. При этом, порог питающего напряжения  соответствующий переходу в процесс сохранения вращения насосного агрегата из стационарного режима функционирования АСУ, должен быть ниже минимального значения напряжения с
соответствующий переходу в процесс сохранения вращения насосного агрегата из стационарного режима функционирования АСУ, должен быть ниже минимального значения напряжения с  . Выход изэтого процесса осуществляется тогда, когда происходит восстановление напряжения питающей сети.
. Выход изэтого процесса осуществляется тогда, когда происходит восстановление напряжения питающей сети.
Целью регуляторов АСУ в режиме «удержания» двигателя является стабилизация напряжения поступающего на насосный агрегат. Компенсация потерь в преобразователе частоты и АСУ производится с помощью регулирования активной составляющей тока нагрузки в функции напряжения звена постоянного тока [4]
 (1)
(1)
где - уставка активной составляющей тока статора, формируемая регулятором режима АСУ;
- уставка активной составляющей тока статора, формируемая регулятором режима АСУ;
 - текущее значение активной составляющей тока статора, используемое регулятором состояния объекта управления АСУ в качестве сигнала обратной связи.
- текущее значение активной составляющей тока статора, используемое регулятором состояния объекта управления АСУ в качестве сигнала обратной связи.
Перейти в режим «удержания» двигателя из стационарного режима возможнос помощью состояния холостого хода насосного агрегата [3], характеризующегося минимумом преобразуемой мощности:
 (2)
(2)
Точка холостого хода (2) доставляет ноль нагрузочной характеристике импульсной системы преобразования электроэнергии (ИСПЭ). Отсюда следует, нагрузочная характеристика является целевой функцией для сохранения вращения насосного агрегата и определяется скоростью перехода от номинального стационарного режима к состоянию холостого хода или быстродействием регуляторов нижнего уровня АСУ. Задержка по времени в состояние холостого хода приводит к дополнительным потерям реактивной энергии, на ненужное поддержание исходного стационарного режима АСУ.
Кроме того, возникают сложности сохранения вращения насосного агрегата при переходе из стационарного режима преобразования АСУ ИСПЭ, характеризуемого номинальным выходным напряжением, превышающим пороговое значение напряжения при сохранении вращения. Повысить выходное напряжение ИСПЭ возможно за счет за счет перехода в режим ослабления поля. Данное действие уменьшит напряжение ИСПЭ, используемого для компенсации противо-ЭДС насосного агрегата.
Работа насосных агрегатов первого подъема характеризуется незначительной инерцией нагрузки, а также частыми сменами режимов функционирования. Поэтому возникает проблема повторного пуска для вращающегося двигателя — «подхвата». Решение данной проблемы сократит время простоя насосного агрегата, и повысит производительность водозабора. Для оценки эффективности режима повторного пуска используется параметр быстродействия — скорость «подхвата» электродвигателя.
Графическое представление разработанного алгоритма реализации режима «удержания» двигателя и выхода на режим работы, согласно регламенту, представлено на рисунке 1.
При возникновении просадок напряжения на 1–2 секунды обеспечивается подхват двигателя насосного агрегата (пуск на вращающийся двигатель). Если просадка напряжения на вводе составила более 2 секунд, то возможно два варианта развития событий: в случае, если приводной двигатель не успел остановиться и продолжает вращение в момент появления напряжения, то осуществляется подхват. Если двигатель остановился до появления напряжения питания, то в этом случае производится пуск в автоматическом режиме с выдачей соответствующей информации в АСУ ТП верхнего уровня.
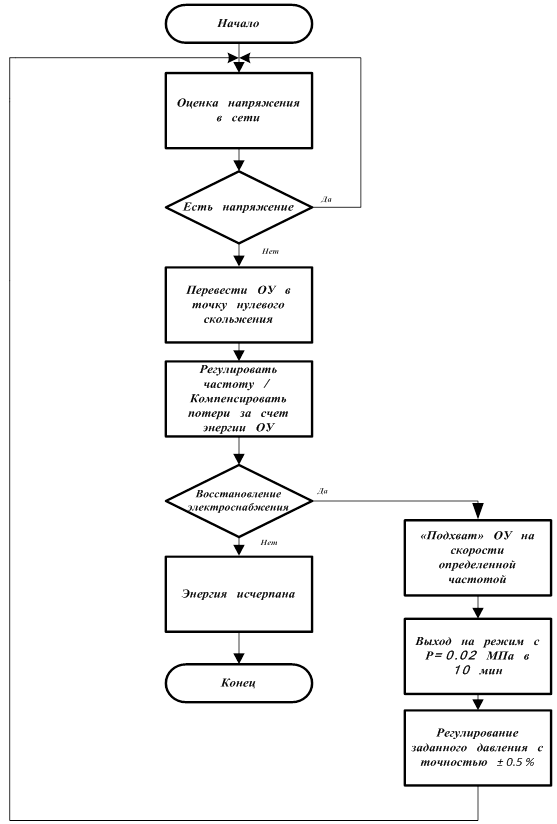
Рис.1. Алгоритм реализации режима «удержания» двигателя и его повторного пуска (подхвата)
При разработке алгоритма повторного пуска необходимо идентифицировать состояние объекта управления. Идентификации подлежат переменные состояния, определяющие показатели качества работы насосного агрегата (например, частота вращения вала) и, соответственно, определяющие временной масштаб переходных процессов в системе.
Алгоритм подхвата, в общем виде, включает два этапа:
1) перевод насосного агрегата в состояние холостого хода;
2) перевод насосного агрегата в заданный стационарный режим.
При реализации первого этапа алгоритма повторного пуска используют нагрузочную характеристику ИСПЭ в качестве целевой функцией. Регулятор режима преобразования частоты при подхвате осуществляет поиск точки холостого хода, используя в качестве сигнала рассогласования, значение целевой функции. В частности регулятор режима может быть реализован как ПИД- регулятор. Регуляторы нижнего уровня — регуляторы состояния объекта управления реализуют стабилизирующее управление  =const.
=const.
В режиме повторного пуска быстродействие является одним из главных критериев эффективности работы регуляторов. Он следует из необходимости обеспечить минимальное время подхвата, а также реализовать на нижнем уровне АСУ ограничение переменных насосного агрегата в условиях их стабилизации при максимальной уставке, а также в условиях нестационарности.
Процесс повторного пуска завершается если выполняется следующее составное условие: целевая функция минимальна и удовлетворяются условия, при допущении которых она была получена.
После всех выше описанных процедур система управления выводит насосный агрегат на рабочий режим, который осуществляется с изменением давление 0,02 МПа не менее 10 мин. Полная работа насосного агрегата представлена на рисунке 2 (выход на режим, регулирование при заданной уставке, останов насосного агрегата).
Таким образом, с помощью разработанного алгоритма повышается эффективность работы насосного агрегата первого подъема водозабора.
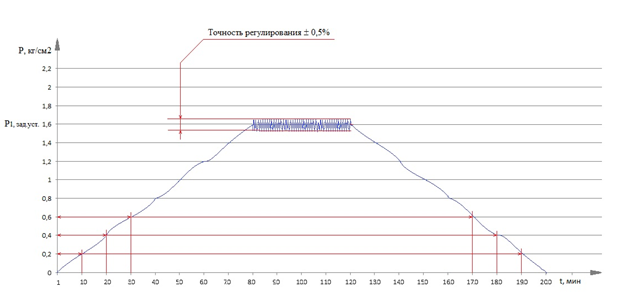
Рис. 2. Запуск насоса, регулирование при заданной уставке, остановка насосного агрегата
Литература:
1. Тугай А. М. Водоснабжение. Водозаборные сооружения. — Киев: Вишашкола, 1984. — 200 с.
2. Прозоров И. В. Гидравлика, водоснабжение и канализация: учебное пособие для строит. спец. Вузов / И. В. Прозоров, Г. И. Николадзе, А. В. Минаев.- М.: Высш.шк., 1990.- 448 с.
3. Косчинский С. Л. Спецификация и формализация процессов управленияасинхронного электропривода в составе АСУ ТП //Мехатроника, автоматизация, управление, 2006, № 6, с.35–40.
4. Косчинский С. Л. Автоматизация процессов управления многорежимными импульсными системами электрического и электромеханического преобразования энергии: диссертация доктора технических наук: 05.13.06.- Орел, 2006.- 274 с.
