




Ключевые слова: надежность, самоконтроль, эргатическая система, временная избыточность
Эргатические системы управления с переменной структурой, являются неотъемлемыми техническими элементами современных судов. Такие системы, участвуя в транспортных и технологических процессах с учетом современной логистики [1], как правило, предусматривают возможность перехода от автоматического к неавтоматическому режиму управлению и наоборот, но в любом случае при обязательном участии судового специалиста (оператора). Если резервируются управляющее устройство, то судовой специалист может дистанционно управлять как исполнительным усилителем, так и адаптировать управляющее устройство. В аварийных случаях судовой специалист должен вручную поддерживать необходимое состояние объекта непосредственно по месту его установки. При этом информацию о поведении объекта управления судовой специалист должен получать от системы обработки и отображения данных, состоящей из цифрового информационно-вычислительного устройства, работающего в рамках используемого программного продукта.
Для устранения не соответствий между текущим состоянием технологического процесса и плановым состоянием на судне принимаются решение и соответствующие им управления, которые могут быть как работающими, так и не работающими или иными словами управлениями, возвращающими судового специалиста вновь к той же проблеме. В результате применения не работающих управлений через некоторое время могут возникнуть непредвиденные последствия или иными словами классическая ситуация «хотели как лучше, а получилось, как всегда и проблема осталась» [3].
Очевидно, что знание и понимание эффекта не работающих решений чрезвычайно важны для совершенствования любого вида целевой производственной деятельности, в том числе и совершенствования системы управления судном при выполнении транспортных операций. Поэтому на таких этапах программно-целевого управления как планирование, реализация и контроль необходимо правильно оценивать состояние транспортного или технологического процесса. В тоже время на этапе «корректирующих действий» по собранной информации на предыдущих этапах управления принимать адекватные меры — работающие решения, воплощенные в работающие управления [2].
Основной сложностью при оценке состояние принятого решения является то, что связь «решение — проблема» может обладать двойственным свойством и не допускает какого-либо математического описания в терминах «уравнения в отклонениях». Поэтому сформулированную задачу по идентификации связи «решение — проблема» можно лишь рассматривая эту задачу как вариант оценки непрерывности отображения «выход — вход». Факт непрерывности (отсутствие задержки в линии связи) в отображении «выход — вход» будет соответствовать принятию судовым специалистом работающего решения, а факт наличия задержки или прерывность отображения «выход — вход» — не работающему решению. Естественно, что соответствующие оценки, классифицирующие состояния принятых решений будут зависеть как от транспортных или технологических процессов, так и от метрик используемых судовым специалистом при самоконтроле за состоянием принимаемых решений [4].
Рассмотрим эргатическую систему, которая включает субъекта (судового специалиста), обладающего механизмом самоконтроля за состоянием принимаемых им решений, функционирующим с переменной временной избыточностью в пределах [0, τ] и автоматическую систему управления параметрами транспортного или технологического процесса. Переменная временная избыточность в эргатической системе может быть обеспечена или за счет инерционности технических средств, или психофизических свойств «человеческого элемента». Тогда при разрешении проблемной ситуации, возникающей в эргатической системе и связанной с изменением режима управления, механизм самоконтроля судового специалиста может оперировать следующими гипотезами относительно состояний принимаемых решений:
- H0 — работающее решение, способное устранить угрозы безопасному состоянию транспортного или технологического процесса и идентифицированное в момент обнаружения проблемной ситуации;
- H1 — не работающее решение, но такое, которое способное быть измененным на работающее решение за счет наличия временной избыточности заданной в пределах [0, τ];
- H2 — не работающее решение не способное к последующему преобразованию в работающее решение из-за отсутствия необходимой временной избыточности заданной только в пределах [0, τ].
В качестве основного количественного показателя надежности идентификации механизмом самоконтроля состояний принимаемых решений, способных в конечном итоге обеспечивать безопасность транспортному или технологическому процессу будем использовать вероятность принятия судовым специалистом таких решений. Тогда через pi(t, τ) можно обозначить условную вероятность, которая будет характеризовать состояние принятого судовым специалистом решения в рамках принятых гипотез Hi (i =0, 1, 2).
Схематичное отображение процесса идентификации работающих и не работающих решений реализуемого в механизме самоконтроля с учетом инерционности технических средств и психофизических особенностей судового специалиста представлено на Рис.1.
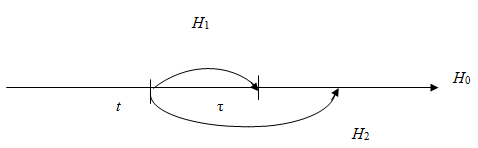
Рис. 1.
Если при обнаружении проблемной ситуации в момент t и условии, что до этого механизм самоконтроля судового специалиста ни разу не идентифицировал решений с состоянием H2, то вероятность P(t, τ)решений с состояниями, которые способны обеспечить безопасность транспортному или технологическому процессу будет равна

Значение P(t, τ)будет существенно зависеть от принятых предположений относительно видов закона распределения времени функционирования механизма самоконтроля до принятия не работающего решения F(t) и закона распределения временной избыточности при идентификации состояния решения судового специалиста G(t). Так если G(t) таково, что G(τ) = 1 (во всех случаях принимаются работающие решения), то при любом законе F(t) искомая вероятность равна
 .
.
В общем случае нахождение p0(t, τ) и p1(t, τ) (см. Рис. 1) связано с решением интегральных и интегро-дифференциальных уравнений и требует привлечения приближенных вычислительных методов [5]. Поэтому с целью упрощения выкладок положим, что

Тогда вероятности p0(t, τ) и p1(t, τ)можно найти путем решения интегральных уравнений вида
 (1)
(1)
 ,
,
где R1(x) — вероятность того, что механизм самоконтроля идентифицирует работающее решение, имея временную избыточность равную y, которая не превышает величины τибольше не принимает никаких других решений за время x — y:
t
 (2)
(2)
R2(x) — вероятность того, что механизм самоконтроля идентифицирует не работающее решение, обладая временной избыточностью длительностью равной времени x
 (3)
(3)
Подставляя выражения (2) и (3) в систему (1) и используя преобразование Лапласа можно получить:


где
Тогда вероятность принятия судовым специалистом решения, которое способно преобразовать в эргатической системе проблемную ситуацию в обычную эксплуатационную (стандартную) ситуацию можно найти из выражения

Выражение (4) принципиально позволяет найти искомую вероятность P(t, τ) при любом законе распределения времени инерционности элементов эргатической системы G(t), при принятии решенияиспользуя, например, численные методы.
Исследуем асимптотическое поведение величины P(s,τ), когда вероятность принятия однократного не работающего решения стремиться к нулю

Пусть далее X случайное время принятия решений механизмом самоконтроля судового специалиста. Тогда учитывая выражение (4) можно ожидать, что при фиксированном значении λ величина γX для γ → 0 будет сходиться к некоторому предельному распределению. Если события

равновероятны, а вероятность последнего события является величиной P(t/γ, τ), то преобразование Лапласа функции

получается непосредственно из выражения (4) умножением последнего на γ и заменой s на γs. В итоге можно получить

Используем обобщенную теорию о среднем значении и представим g(γs, τ)так


В свою очередь, раскладываяexp(– sγθ)вряд Маклорена, найдем

Аналогично можно получить, что

Тогда при γ→ 0 стремление

равномерно на любом конечном отрезке изменения s.
Если дополнительно принять, что

то из выражения (5) непосредственно следует приближенное равенство
Поэтому окончательно можно найти асимптотическое распределение времени принятия судовым специалистом решений, снимающих проблемные (опасные) ситуации в эргатической системе с переменной структурой.

Полученную зависимость целесообразно использовать в практических расчетах надежности судовых эргатических систем с переменной структурой при известных значениях инерционности технических средств или заданных психофизических характеристиках судовых специалистов.
Литература:
1. Гагарский, Э. А. Логистическое обоснование и разработка прогрессивных транспортно-технологических систем на базе оптимальных модулей массы и величины: монография/ Э. А. Гагарский; Федеральное агентство по рыболовству, ФГБОУ ВПО «Мурманский государственный технический университет»- Мурманск: Изд-во МГТУ, 2012–118с.
2. Гладышевский М. А. Организационно-технические структуры, обеспечивающие безопасную эксплуатацию судна / М. А. Гладышевский, М. А. Пасечников, К. В. Пеньковская; под общ. ред. В. И. Меньшикова. — Мурманск: Изд-во МГТУ, 2008. — 212 с.
3. Никитцев К. В. Непрерывность причинно-следственных связей и ее влияние на характер выбранного решения / Никитцев К. В.,Шутов В. В., Меньшиков В. И. // Рыбное хозяйство. № 5–2010- С.87–92
4. Рамков И. А. Самоконтроль при обработке навигационной информации в структурах безопасного мореплавания / И. А. Рамков, В. И. Меньшиков // Научное обозрение, № 5, 2009. С. 14–16.
5. Феллер, В. Введение в теорию вероятностей и ее приложения. Т. 2. — М.: Мир, — 1976. — 435 с.
