




Ключевые слова: ПИД-регулятор, нечёткий регулятор, метод Зиглера-Николса, нейро-нечёткая сеть.
Известно, что ПИД-регулятор относится к наиболее распространённому типу регуляторов. Порядка 90-95% регуляторов, находящихся в настоящее время в эксплуатации, используют ПИД-алгоритмы [1, с. 106] В связи с этим возникает вопрос о выборе метода настройки коэффициентов ПИД-регулятора.
Сложные технологические процессы связаны с влиянием на них целого ряда неопределенных факторов (внешних и параметрических возмущений).[3, с. 171] Для получения ожидаемых характеристик АСУ, работающих в условиях неопределённости, особую актуальность в теории управления приобретают адаптивные подходы [4, с. 53] Один из таких подходов – использование аппарата нечёткой логики.
В работах [1], [4], [5] сравниваются методы настройки ПИ- и ПИД-регуляторов в САР, функционирующих в условиях параметрических возмущений (изменений значений передаточной функции объекта управления). В настоящей работе будет проведён сравнительный анализ методов расчёта оптимальных настроек ПИД-регулятора, работающего в условиях внешних возмущений разной величины.
В качестве примера выбран объект управления второго порядка с
запаздыванием, параметры которого следующие:
![]() (рис.1)
(рис.1)

Рис. 1. Схема САУ с ПИД-регулятором
Существуют приближённые формулы оптимальных настроек регуляторов. Они основаны на аналитических исследованиях Коэна-Куна, Чина, Хронса и Ресвика, [6, с. 58-59]. Зная параметры объекта регулирования, нетрудно рассчитать коэффициенты ПИД-регулятора. При подстановке найденных коэффициентов в исходную САУ получаем незатухающий колебательный процесс. Следовательно, приближённые формулы не позволяют адекватно настроить ПИД-регулятор.
Настроим регулятор методом незатухающих колебаний (Зиглера-Никольса). Популярность этого метода обусловлена отсутствием сложных математических расчётов и тем, что адаптивные контроллеры зарубежных и отечественных производителей, как правило, реализуют метод Зиглера-Николса [5] Настроим регулятор частотным методом: по КЧХ вспомогательной функции [7, с. 155]. Показатели качества САУ, полученные при обоих методах, занесём в таблицу 2.
Подадим на объект внешнее возмущение в виде константы, подведём его к
сумматору, расположенному на рис. 1 перед блоком “Object
upravleniya”. Меняя значение
константы от 0,02 до 10, вычислим значения критического коэффициента
пропорциональности
![]() и критического периода ПИД-регулятора
и критического периода ПИД-регулятора
![]() согласно методу Зиглера-Никольса [6, с. 62]. Изменение
согласно методу Зиглера-Никольса [6, с. 62]. Изменение
![]() не влияет на значения
не влияет на значения
![]() и
и
![]() ,
значит, настройки ПИД-регулятора, вычисленные при отсутствии внешнего
возмущения методом Зиглера-Николса и частотным методом, можно
использовать при возмущении типа константа. Данные о качестве
переходного процесса САУ при различных величинах возмущающего
воздействия
,
значит, настройки ПИД-регулятора, вычисленные при отсутствии внешнего
возмущения методом Зиглера-Николса и частотным методом, можно
использовать при возмущении типа константа. Данные о качестве
переходного процесса САУ при различных величинах возмущающего
воздействия
![]() и его отсутствии представлены в таблице 1.
и его отсутствии представлены в таблице 1.
Таблица 1
|
|
Зиглера-Николса |
КЧХ вспомогательной функции |
||||||
|
|
|
ψ |
|
|
|
ψ |
|
|
|
0 |
1,3654 |
1,0497 |
0,231214 |
12,1408 |
1,3226 |
1,0513 |
0,205126 |
13,6324 |
|
0,02 |
1,4181 |
1,0559 |
0,255412 |
12,6927 |
1,3911 |
1,0591 |
0,23866 |
14,2074 |
|
0,05 |
1,5081 |
1,0672 |
0,292355 |
13,2134 |
5,1348 |
1,0686 |
0,791891 |
14,7643 |
|
0,1 |
1,4181 |
1,0482 |
0,260842 |
12,6427 |
1,6711 |
1,0911 |
0,347077 |
14,706 |
|
0,3 |
2,0685 |
1,1229 |
0,457143 |
10,1904 |
2,4304 |
1,1817 |
0,513784 |
18,0103 |
|
0,5 |
2,5049 |
1,1734 |
0,531558 |
10,5421 |
3,4551 |
1,3412 |
0,61182 |
20,0761 |
|
0,7 |
2,9447 |
1,2243 |
0,584236 |
10,5115 |
3,9969 |
1,4499 |
0,637244 |
19,8589 |
|
1 |
4,478 |
1,3958 |
0,688298 |
14,4075 |
5,1348 |
1,5024 |
0,707408 |
22,5471 |
|
3 |
8,0894 |
1,8771 |
0,767956 |
14,9888 |
13,4074 |
2,4981 |
0,813678 |
26,9678 |
|
5 |
12,4436 |
2,3245 |
0,813197 |
19,3021 |
20,2497 |
3,5002 |
0,827148 |
26,1207 |
|
7 |
24,068 |
3,893 |
0,83825 |
24,9696 |
29,4386 |
4,6213 |
0,843019 |
28,9784 |
|
10 |
23,8726 |
3,3812 |
0,858365 |
19,3021 |
41,2563 |
6,2764 |
0,847868 |
26,9426 |
где
![]() – соседние амплитуды одного знака, ψ- степень затухания,
– соседние амплитуды одного знака, ψ- степень затухания,
![]() -
время регулирования.
-
время регулирования.
САУ с параметрами ПИД-регулятора, вычисленными частотным методом, обладает меньшим качеством управления.
Возмущения могут иметь вид не только безынерционного звена.
Рассмотрим ситуацию, когда на объект управления налагается внешнее
возмущение в виде инерционного звена первого порядка. Зафиксируем
коэффициент усиления (пусть K=5). Будем
подавать в систему внешнее возмущение с различными значения
постоянной времени интегрирующего звена
![]() .
Вычислим соответствующие
.
Вычислим соответствующие
![]() и
и
![]() (таблица 2)
(таблица 2)
Таблица 2
|
|
0,02 |
0,05 |
0,08 |
0,1 |
0,13 |
0,15 |
0,18 |
0,2 |
0,21 |
0,22 |
|
|
0,5195 |
0,521 |
0,5231 |
0,5261 |
0,5277 |
0,5242 |
0,5061 |
0,4927 |
0,4787 |
0,4648 |
|
|
5,315 |
5,352 |
5,2939 |
4,9704 |
5,3276 |
5,0651 |
5,4919 |
5,2451 |
5,558 |
5,4203 |
|
|
0,25 |
0,28 |
0,3 |
0,32 |
0,34 |
0,37 |
0,4 |
0,45 |
0,5 |
0,6 |
|
|
0,44 |
0,415 |
0,412 |
0,4087 |
0,407 |
0,425 |
0,425 |
0,425 |
0,43 |
0,43 |
|
|
5,3987 |
5,5966 |
5,4893 |
6,746 |
5,4389 |
5,5257 |
5,2567 |
5,4229 |
5,391 |
5,4644 |
|
|
0,7 |
0,8 |
1 |
1,1 |
1,2 |
1,4 |
2 |
5 |
8 |
10 |
|
|
0,44 |
0,43 |
0,415 |
0,4138 |
0,4132 |
0,4111 |
0,41 |
0,344 |
0,33 |
0,31 |
|
|
5,3913 |
5,2551 |
6,1955 |
5,6813 |
5,6052 |
5,6043 |
5,8788 |
5,1497 |
6,7002 |
7,0353 |
При значениях
![]() от 0,02 до 0,8 значения
от 0,02 до 0,8 значения
![]() остаются практически неизменными (дрейф показаний обусловлен
точностью расчёта Simulink), от 0,8 до 10
начинают увеличиваться.
остаются практически неизменными (дрейф показаний обусловлен
точностью расчёта Simulink), от 0,8 до 10
начинают увеличиваться.
![]() имеет два локальных максимума: при
имеет два локальных максимума: при
![]() и
и
![]() .
.
Серия экспериментов показала, что при наличии внешнего возмущающего воздействия в виде инерционного звена необходимо осуществлять перенастройку ПИД-регулятора. Этого недостатка лишена САУ с нечётким блоком настройки ПИД-регулятора. Известно, что нечеткое управление основано на практическом применении знаний квалифицированных специалистов, представленных в форме лингвистических баз правил. Нечеткое управление эффективно в случаях недетерминированности параметров объектов, когда существует определенный опыт экспертов по управлению и настройке автоматизированной системы регулирования (АСР). [5]
В настоящей работе параметры объекта управления уже заданы, но существует дрейф параметров внешнего возмущения. Экспертом в данном случае выступает исследователь, проводящий серию опытов.
Зная связь между
![]() и
и
![]() и коэффициентами ПИД-регулятора:
и коэффициентами ПИД-регулятора:
![]() [6, с. 62], спроектируем на основе полученных в таблице 2
данных нечёткую экспертную систему в прикладном пакете Matlab
Fuzzy Logic
Toolbox (редактор FIS).
В этой среде наглядно представлены функции принадлежности и база
правил, но математический алгоритм нечёткого вывода Мамдани и Сугено
скрыт от пользователя. Для простоты реализации функциям
принадлежности задан трапецеидальный или треугольный вид.
[6, с. 62], спроектируем на основе полученных в таблице 2
данных нечёткую экспертную систему в прикладном пакете Matlab
Fuzzy Logic
Toolbox (редактор FIS).
В этой среде наглядно представлены функции принадлежности и база
правил, но математический алгоритм нечёткого вывода Мамдани и Сугено
скрыт от пользователя. Для простоты реализации функциям
принадлежности задан трапецеидальный или треугольный вид.
Функция принадлежности, представляющая терм «малое значение “mal”» входной лингвистической переменной «постоянная интегрирования внешнего возмущения “Tv”», представлена в виде f(x) = [1, x<=-0.18; 3,57-x/0,07, 0,18<x<=0,25; 0, 0,18<x]
Терм «небольшое значение “neb”»: f(x) = [0, x<=0,18; x/0,02-9, 0,18<x<=0,2; 1, 0,2<x<=0,28; -x/0,06+4,73, 0,28<x<=0,34; 0 ,0,34<x]
Терм «среднее значение ”sr”»: f(x) = [0, x<=0,3; x/0,07-4,29, 0,3<x<=0,37; 1, 0,37<x<=0,8; -x/0,4+1,6, 0,8,<x<=1,2; 0 ,1,2<x]
Терм «немалое значение ”nemal”»: f(x) = [0, x<=1; x/0,2-5, 1<x<=1,2; 1, 1,2<x<=3; -x/2+2,5, 3<x<=5; 0, 5<x]
Терм «большое значение ”bol”»: f(x) = [0, x<=2; x/3-2/3, 2<x<=5; 1, 5<x]
Функция принадлежности, представляющая терм «малое значение “mal”» выходной лингвистической переменной «коэффициент пропорциональности ПИД-регулятора “Kp”», представлена в виде f(x) = [0, x<=0,177; x/0,009-19,6667, 0,177<x<=0,186; 1, 0,186<x<=0,2064; -x/0,0396+6,2121, 0,2064<x<=0,246; 0, 0,246<x]
Терм “neb”: f(x) = [0, x<=0,23; x/0,018-12,7778, 0,23<x<=0,248; -x/0,01+25,8, 0,248<x<=0,258; 0 ,0,258<x]
Терм “sr”: f(x) = [0, x<=0,246; x/0,01-24,6, 0,246<x<=0,256; 1, 0,256<x<=0,258; -x/0,06+5,3, 0,258<x<=0,264; 0, 0,264<x]
Терм “nemal”: f(x) = [0, x<=0,249; x/0,0299-8,3278, 0,249<x<=0,2789; -x/0,0248+12,246, 0,2789<x<=0,3037; 0, 0,3037<x]
Терм “bol”: f(x) = [0, x<=0,2872; x/0,0245-11,7224, 0,2872<x<=0,3117; 1, 0,3117<x]
Функция принадлежности, представляющая терм «малое значение “mal”» выходной лингвистической переменной «постоянная интегрирования ПИД-регулятора “Ti”», представлена в виде f(x) = [1, x<=-0.18; 3,57-x/0,07, 0,18<x<=0,25; 0, 0,18<x]
Терм “mal”: f(x) = [1, x<=2,663; -x/0,036-74,9722, 2,663<x<=2,699; 0, 2,699<x]
Терм “neb”: f(x) = [0, x<=2,623; x/0,118-22,2288, 2,623<x<=2,741; -x/0,057+49,0877, 2,741<x<=2,798; 0 ,2,798<x]
Терм “nemal”: f(x) = [0, x<=2,732; x/0,168-16,2619, 2,732<x<=2,9; -x/0,4+8,25, 2,9<x<=3,3; 0, 3,3<x]
Терм “bol”: f(x) = [0, x<=2,93; x/0,42-6,9762, 2,93<x<=3,35; 1, 3,35<x]
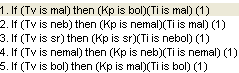
Рис. 2. База правил нечёткого регулятора
Полученные в редактор FIS данные (![]() и
и
![]() )
– два из трёх настроечных
параметров ПИД-регулятора, но согласно методу Зиглера-Николса
существует связь между постоянной интегрирования
)
– два из трёх настроечных
параметров ПИД-регулятора, но согласно методу Зиглера-Николса
существует связь между постоянной интегрирования
![]() и
постоянной дифференцирования
и
постоянной дифференцирования
![]() (
(![]() ,
поэтому нет необходимости в выходной лингвистической переменной
«постоянная дифференцирования ПИД-регулятора “
,
поэтому нет необходимости в выходной лингвистической переменной
«постоянная дифференцирования ПИД-регулятора “![]() ”».
”».
Спроектируем нейро-нечеткий регулятор для
аппроксимации настроек ПИД-регулятора. Данную задачу можно
осуществить в редакторе ANFIS, который позволяет автоматически
синтезировать нечеткую нейронную сеть (ННС) из экспериментальных
данных. ННС можно рассматривать как одну из разновидностей систем
нечеткого логического вывода типа Сугено. [2, с. 5] Количество циклов
зададим равное 40, метод обучения – обратного распространения
ошибки. Таких сетей создано две – в одной функции
принадлежности и базу данных система сформирует автоматически, в
другой – сформирована автором на основании данных таблицы 2:
вид функций принадлежности всех лингвистических переменных –
треугольная ломаная, для входной лингвистической переменной
«постоянная интегрирования возмущающего воздействия»
![]() вершина каждого из 40 термов совпадает соответственно с текущим
значением
вершина каждого из 40 термов совпадает соответственно с текущим
значением
![]() (входная переменная), левая и правая сторона соответственно с
предыдущем и следующим значением
(входная переменная), левая и правая сторона соответственно с
предыдущем и следующим значением
![]() в таблице 2; термы выходных лингвистических переменной
в таблице 2; термы выходных лингвистических переменной
![]() и
и
![]() строятся аналогично. В действительности создано четыре нейро-нечётких
сети – по две на пользовательскую и непользовательскую. Это
связано с тем, что редактор ANFIS программы
Matlab допускает использование только
алгоритма Сугено для одной выходной переменной. В двух
пользовательских базах правил по 30 правил.
строятся аналогично. В действительности создано четыре нейро-нечётких
сети – по две на пользовательскую и непользовательскую. Это
связано с тем, что редактор ANFIS программы
Matlab допускает использование только
алгоритма Сугено для одной выходной переменной. В двух
пользовательских базах правил по 30 правил.
База, сформированная пользователем, оказалась более точной; предложенная программой хуже аппроксимирует экспериментальные данные.
Сравним качество управления при настройках, полученных нечётким
регулятором и двумя нейро-нечёткими сетями. В качестве входных
значений выбраны не входящие в таблицу числа из диапазона
![]() [0:10]. Результаты представлены в таблицах 4-6.
[0:10]. Результаты представлены в таблицах 4-6.
Таблица 4
|
|
Нечёткий регулятор |
||||||
|
|
|
|
|
|
|
ψ |
|
|
0,0300 |
0,3070 |
2,5800 |
0,645 |
16,0186 |
3,6914 |
0,7696 |
27,9406 |
|
0,1900 |
0,2900 |
2,5800 |
0,645 |
17,6820 |
4,4266 |
0,7497 |
30,3206 |
|
0,3500 |
0,2550 |
2,7200 |
0,68 |
18,0724 |
4,1409 |
0,7709 |
45,6708 |
|
1,3000 |
0,2450 |
2,9800 |
0,745 |
14,5579 |
2,6957 |
0,8148 |
* |
|
6,5000 |
0,2070 |
3,3100 |
0,8275 |
8,3621 |
0,0000 |
1,0000 |
182,1826 |
где * - незатухающие колебания
Таблица 5
|
|
Нейро-нечёткая сеть-1 |
||||||
|
|
|
|
|
|
|
ψ |
|
|
0,0300 |
0,2820 |
2,7400 |
0,685 |
16,6403 |
3,2825 |
0,8027 |
25,5787 |
|
0,1900 |
0,2790 |
2,7400 |
0,685 |
17,7379 |
3,8146 |
0,7849 |
17,7036 |
|
0,3500 |
0,2760 |
2,7400 |
0,685 |
17,0840 |
3,6509 |
0,7863 |
* |
|
1,3000 |
0,2560 |
2,7500 |
0,6875 |
14,4792 |
3,0396 |
0,7901 |
* |
|
6,5000 |
0,1870 |
3,0200 |
0,755 |
8,9975 |
0,0000 |
1,0000 |
49,3115 |
Таблица 6
|
|
Нейро-нечёткая сеть-2 |
||||||
|
|
|
|
|
|
|
ψ |
|
|
0,0300 |
0,3120 |
2,6600 |
0,665 |
15,7613 |
3,3690 |
0,7862 |
24,6753 |
|
0,1900 |
0,3000 |
2,6700 |
0,6675 |
17,3260 |
4,1149 |
0,7625 |
26,4516 |
|
0,3500 |
0,2480 |
2,5900 |
0,6475 |
18,6683 |
4,0601 |
0,7825 |
* |
|
1,3000 |
0,2470 |
3,1000 |
0,775 |
14,9285 |
2,4939 |
0,8329 |
* |
|
6,5000 |
0,2020 |
2,9600 |
0,74 |
8,4582 |
0,0000 |
1,0000 |
197,2161 |
Интерпретация результатов настоящей статьи:
Приближённые формулы настройки ПИД-регулятора являются неточными.
Метод Зиглера-Николса является более точным по сравнению с частотным методом (по КЧХ вспомогательной функции), особенно при возмущении типа интегрирующее звено, так как позволяет учитывать изменения параметров возмущения.
При помощи метода Зиглера-Николса можно получить только фиксированные настройки; необходим пересчёт фиксированных настроек Зиглера-Николса при дрейфе постоянной интегрирования внешнего воздействия.
Если возмущение имеет вид константы (безынерционного звена), то фиксированные настройки ПИД-регулятора менять не следует.
Полученный нечёткий регулятор является адаптивным.
Для построения функции принадлежности нечёткого регулятора необходимы знания эксперта; нелинейность зависимости критического коэффициента усиления от постоянной интегрирующего звена внешнего возмущения показывает, что эксперт (носитель статистических данных о работе САУ) является уникальным.
Нейро-нечёткая сеть позволяет аппроксимировать полученные настройки на всём необходимом диапазоне. Сеть с пользовательскими настройками выдаёт более адекватные результаты, нежели сеть с базой данных, предложенной системой. Однако нейро-нечёткая сеть уступает по своим характеристикам нечёткому регулятору в области «редких» значений (в настоящей работе при
 )
)
Литература:
Волянский С. М. Сравнительный анализ регуляторов, применяемых в системах управления энергосберегающим электроприводом постоянного тока / С. М. Волянский, Я. Б. Волянская // Вестник КГПУ им. Михаила Остроградского. – 2008. – Выпуск 4(51). – С. 106-108.
Мишин А. А. Методы построения баз знаний для управления нелинейными динамическими системами / А. А. Мишин, Н. Ю. Нефедов, С. П. Петров // Системный анализ в науке и образовании [Электронный журнал]. – 2011. - №2. – С. 1-34.
Михайленко В. С. Анализ методов разработки нечётких САР для управления сложными взаимосвязанными объектами / В. С. Михайленко, В. Ф. Ложечников // ААЭКС. – 2009. - №1.
Михайленко В. С. Использование нечёткого алгоритма Такаги-Сугено в адаптивных системах управления сложными объектами / В. С. Михайленко, Р. Ю. Харченко // Штучный интеллект. – 2011. - №2. – С. 53-59.
Михайленко В. С. Методы настройки нечёткого адаптивного ПИД-регулятора / В. С. Михайленко, В. Ф. Ложечников // ААЭКС. – 2009. – №2(24).
Новиков С. И. Оптимизация автоматических систем регулирования теплоэнергетического оборудования / С. И. Новиков. – Новосибирск: НГТУ, 2006. – 108 с.
Ротач В. Я. Теория автоматического управления: учебник для вузов / В. Я. Ротач. – М.: Издательский дом МЭИ, 2008. – 396 с.