




В пакете учебных программ необходимо иметь примеры программирования в Delphi многоконтурных систем подчиненного регулирования электроприводов. Системы автоматического регулирования положения строятся путем дополнения рассмотренных в [2] САР скорости системой автоматического регулирования положения (или угла поворота вала двигателя). Таким образом, для регулирования положения используется трехконтурная структура, содержащая внутренний контур регулирования тока якоря, промежуточный контур регулирования скорости и внешний контур регулирования положения. Промежуточная САР скорости может быть как одно -, так и двукратной, что предопределяет и тип САР положения.
Вариант 1. Однократная система автоматического регулирования положения.
На рис.1. приведен контур положения, состоящий из сумматора, пропорционального регулятора скорости, внутреннего контура тока (САР тока якоря), механической части привода с моделируемой нагрузкой в Delphi и обратными связями по скорости и положению.
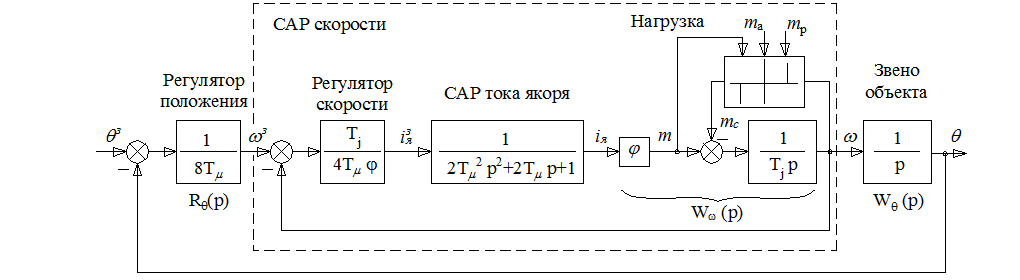
Рис.1. Структурная схема однократной САР положения
Для структурной схемы однократной САР положения (рис.1.) запишем следующую систему дифференциальных уравнений:

Данная система уравнений дополняет аналогичную систему дифференциальных уравнений, приведенных в [2], для однократной САР скорости двумя уравнениями:

Решение данной системы дифференциальных уравнений произведем на языке программирования высокого уровня Delphi методом Рунге-Кутты 4-го порядка. Для реализации поставленной задачи запишем вышеуказанные уравнения как функции в разделе private:
-
function
diaf(iaf,ioc,ik,uu,ia,v,t:real):real;
- function dioc(iaf,ioc,ik,uu,ia,v,t:real):real;
- function dik(iaf,ioc,ik,uu,ia,v,t:real):real;
- function duu(iaf,ioc,ik,uu,ia,v,t:real):real;
- function dia(iaf,ioc,ik,uu,ia,v,t:real):real;
- function dv(iaf,ioc,ik,uu,ia,v,t:real):real;
- function Mc(v,t:real):real;
- function dioc(iaf,ioc,ik,uu,ia,v,t:real):real;
После нажатия на сочетание клавиш Ctrl+Shift+C получим заготовки, которые компилятор создаст сам. В эти заготовки запишем уравнения:
- function
TMainForm.dia(iaf,ioc,ik,uu,ia,v,t:real):
real;
- begin
- dia:=(kp*((iaf-ioc+ik)*kt+uu)-v*phi-ra*ia)/(ra*Ta);
- end;
- function TMainForm.diaf(iaf,ioc,ik,uu,ia,v,t:real): real;
- begin
- diaf:=((Tj*(vzad-v)/(4*Tmu*phi))-iaf)/Tmu;
- end;
- function TMainForm.dioc(iaf,ioc,ik,uu,ia,v,t:real): real;
- begin
- dioc:=(ia-ioc)/Tmu;
- end;
- function TMainForm.duu(iaf,ioc,ik,uu,ia,v,t:real): real;
- begin
- duu:=(iaf-ioc+ik)/Tt;
- end;
- function TMainForm.dv(iaf,ioc,ik,uu,ia,v,t:real):real;
- begin
- dv:=(ia*phi-Mc(v,t))/Tj;
- end;
- function TMainForm.dik(iaf,ioc,ik,uu,ia,v,t:real): real;
- begin
- dik:=(2*Tmu*phi*(ia*phi-Mc(v,t))/(ra*Tj)-ik)/Ta;
- end;
- function TMainForm.Mc(v,t:real):real;
- begin
- if McDataForm.McCheckBox.Checked then
- begin
- Mp:=M0+A1*abs(v)+A2*sqr(v)+A3*abs(Power(v,3));
- Mtp:=1.3*abs(M0);
- if abs(v)>0.0001 then Mcp:=Mp*sign(v)
- else
- begin
- if abs(M-Ma)>Mtp then Mcp:=Mtp*sign(M-Ma)
- else Mcp:=M-Ma
- end;
- Mc:=Mcp+Ma;
- end;
- end;
- begin
Для определения математических функций необходимо прописать модуль «Math» в разделе uses. Создадим раздел констант между разделами type и var с постоянными:
- const
- Tj=0.423; // Данные двигателя Д31: 6,8 кВт, 220 В, 37 А,
- Ta=0.034; // 880 об/мин.
- ra=0.107;
- phi=1;
- kp=1.393;
- Tmu=0.01;
- kt=ra*Ta/(2*kp*Tmu);
- Tt=2*kp*Tmu/ra;
- Tj=0.423; // Данные двигателя Д31: 6,8 кВт, 220 В, 37 А,
В разделе var опишем глобальные переменные:
var
- MainForm: TMainForm; – В данном примере имя формы - MainForm
- iaz,kt,Tt,M,ep,ea,ik,vzad,tetazad,teta,
- {Mc} Mc,Mp,Mtp,Mcp:Real;
- MainForm: TMainForm; – В данном примере имя формы - MainForm
Поместим на форму 2 компонента TChart из вкладки Additional и компонент Button из вкладки Standart.
Щелкнув два раза на каждом компоненте TChart левой кнопкой мыши, появится окно, в котором на вкладке Series нажимаем на кнопку Add. Далее выбираем тип графика FastLine, убираем галочку 3D и нажимаем ОК. На вкладке Legend убираем галочку напротив Visible и нажимаем Close.
Перейдем на вкладку Events в окне Object Inspector, предварительно выделив кнопку.
Щелкнув два раза по позиции OnClick будет автоматически создана процедура по нажатии данной кнопки:
-
procedure
TMainForm.Button1Click(Sender:
TObject);
begin
end;
Опишем переменные необходимые только для данной процедуры. Данный раздел необходимо описать между строками «procedure TMainForm.Button1Click (Sender: Tobject);» и «begin»:
var
- k1ik,k2ik,k3ik,k4ik,
- k1ioc,k2ioc,k3ioc,k4ioc,
- k1iaf,k2iaf,k3iaf,k4iaf,
- k1uu,k2uu,k3uu,k4uu,
- k1uy,k2uy,k3uy,k4uy,
- k1ia,k2ia,k3ia,k4ia,
- k1v,k2v,k3v,k4v,
- dv0,dia0,t0,duu0,dioc0,diaf0,dik0,
- dv1,dia1,duu1,dioc1,diaf1,dik1,
- t,dt,k:Real;
- i:Integer;
- k1ik,k2ik,k3ik,k4ik,
Зададим начальные условия:
- diaf0:=0;
- dioc0:=0;
- dik0:=0;
- duu0:=0;
- dia0:=0;
- dv0:=0;
- t0:=0;
- tetazad:=0.1;
- i:=0;
- dioc0:=0;
Назначим шаг интегрирования:
- dt:=0.0005;
Далее зададим цикл:
- i:=0;
- while i<1000 do
- begin
- while i<1000 do
end;
В данном цикле опишем процедуру расчета системы дифференциальных уравнений методом Рунге-Кутты 4-го порядка. Данный метод описывается следующим образом:
Тогда:
- while
i<1000
do
- begin
- {M} M:=dia0*phi;
- Mc(dv0,t0);
- // Задание на скорость
- vzad:=(tetazad-teta)/(8*Tmu);
// diaf
- k1iaf:=diaf(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2iaf:=diaf(diaf0+0.5*k1iaf,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k3iaf:=diaf(diaf0+0.5*k2iaf,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k4iaf:=diaf(diaf0+k3iaf,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- diaf1:=diaf0+(k1iaf+2*k2iaf+2*k3iaf+k4iaf)/6;
// dioc
- k1ioc:=dioc(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2ioc:=dioc(diaf0,dioc0+0.5*k1ioc,dik0,duu0,dia0,dv0,t0)*dt;
- k3ioc:=dioc(diaf0,dioc0+0.5*k2ioc,dik0,duu0,dia0,dv0,t0)*dt;
- k4ioc:=dioc(diaf0,dioc0+k3ioc,dik0,duu0,dia0,dv0,t0)*dt;
- dioc1:=dioc0+(k1ioc+2*k2ioc+2*k3ioc+k4ioc)/6;
// dik
- k1ik:=dik(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2ik:=dik(diaf0,dioc0,dik0+0.5*k1ik,duu0,dia0,dv0,t0)*dt;
- k3ik:=dik(diaf0,dioc0,dik0+0.5*k2ik,duu0,dia0,dv0,t0)*dt;
- k4ik:=dik(diaf0,dioc0,dik0+k3ik,duu0,dia0,dv0,t0)*dt;
- dik1:=dik0+(k1ik+2*k2ik+2*k3ik+k4ik)/6;
// duu
- k1uu:=duu(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2uu:=duu(diaf0,dioc0,dik0,duu0+0.5*k1uu,dia0,dv0,t0)*dt;
- k3uu:=duu(diaf0,dioc0,dik0,duu0+0.5*k2uu,dia0,dv0,t0)*dt;
- k4uu:=duu(diaf0,dioc0,dik0,duu0+k3uu,dia0,dv0,t0)*dt;
- duu1:=duu0+(k1uu+2*k2uu+2*k3uu+k4uu)/6;
// dia
- k1ia:=dia(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2ia:=dia(diaf0,dioc0,dik0,duu0,dia0+0.5*k1ia,dv0,t0)*dt;
- k3ia:=dia(diaf0,dioc0,dik0,duu0,dia0+0.5*k2ia,dv0,t0)*dt;
- k4ia:=dia(diaf0,dioc0,dik0,duu0,dia0+k3ia,dv0,t0)*dt;
- dia1:=dia0+(k1ia+2*k2ia+2*k3ia+k4ia)/6;
- // dv
- k1v:=dv(diaf0,dioc0,dik0,duu0,dia0,dv0,t0)*dt;
- k2v:=dv(diaf0,dioc0,dik0,duu0,dia0,dv0+0.5*k1v,t0)*dt;
- k3v:=dv(diaf0,dioc0,dik0,duu0,dia0,dv0+0.5*k2v,t0)*dt;
- k4v:=dv(diaf0,dioc0,dik0,duu0,dia0,dv0+k3v,t0)*dt;
- dv1:=dv0+(k1v+2*k2v+2*k3v+k4v)/6;
- // teta
- teta:=teta+dv0*dt; // Расчет угла поворота
- Series1.AddXY(t0,teta); // Выводим график угла поворота
- Series2.AddXY(t0,dv0); // Выводим график скорости
- Inc(i);
- t0:=t0+dt;
- diaf0:=diaf1;
- dioc0:=dioc1;
- dik0:=dik1;
- duu0:=duu1;
- dia0:=dia1;
- dv0:=dv1;
- end;
- begin
После нажатия на кнопку Run (F9) появится окно программы, нажимаем на кнопку и получаем следующие результаты:
На рис.2 представлен результат моделирования контура положения на основе однократной САР скорости.
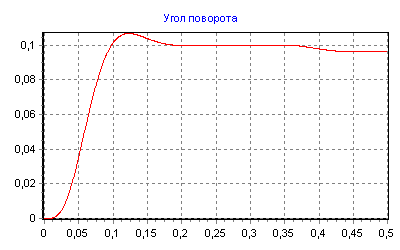

Рис.2. Реакция однократной САР положения
на скачок задающего воздействия и наброс нагрузки
На рис.2 также изображена реакция САР на скачок активного момента статического сопротивления на валу двигателя в момент времени равный 0,35. Данное перемещение представляет собой статическую ошибку по положению, вызванную приложением активной статической нагрузки к валу двигателя.
Параметры графика θ(t) соответствуют стандартам третьего контура системы подчиненного регулирования, для которого время достижения максимума равно 18 Tμ при перерегулировании 6,2%.
Вариант 2. Двукратная система автоматического регулирования положения.
Дополнение рассмотренной выше позиционной САР еще одним контуром регулирования положения (аналогично тому, как на базе однократных САР строятся двукратные САР скорости). В этом случае образуется двукратная САР положения, представляющая собой четырехконтурную систему подчиненного регулирования.
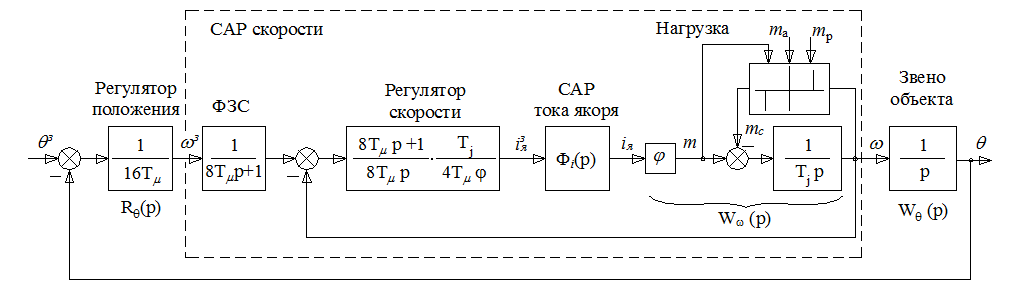
Рис.3. Структурная схема двукратной САР скорости
По структурной схеме, изображенной на рис.3 можно записать следующую систему дифференциальных уравнений, используя методику из [2]:

Решение данной системы дифференциальных уравнений ничем не отличается от приведенного выше, за исключением передаточной функции регулятора положения. Для двукратной САР положения он примет вид:
![]()
После нажатия на кнопку Run (F9) появится окно программы, нажимаем на кнопку и получаем следующие результаты:
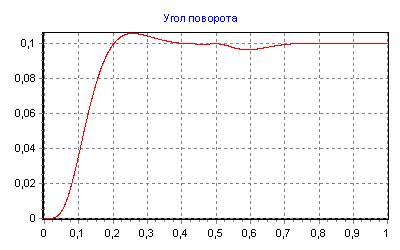
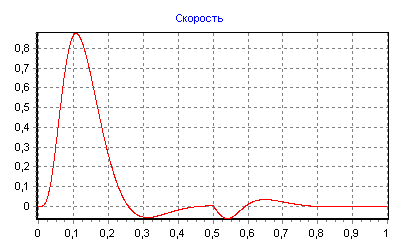
Рис. 4. Реакция однократной САР положения
на скачок задающего воздействия и наброс нагрузки
На рис.4 также изображена реакция САР на скачок активного момента статического сопротивления на валу двигателя в момент времени равный 0,5. Скачкообразное увеличение активной нагрузки на валу вызывает временное (динамическое) изменение положения, т.е. динамическую ошибку, которая затем полностью исключается совместным действием регуляторов положения и скорости.
- Полученные результаты соответствуют общепринятым теоритическим положениям, приведенным в [1].
Литература:
Шрейнер Р.Т. Системы подчиненного регулирования электроприводов. - Екатеринбург: Изд-во ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 279 с.
Емельянов А.А., Медведев А.В., Кобзев А.В. Программирование контура скорости в Delphi // Молодой Ученый – 2012. – №4. – С.1–8.
Архангельский А.Я. Программирование в Delphi для Windows. Версии 2006, 2007, Turbo Delphi. – М.: ООО «Бином-Пресс», 2007.– 1248 с.