




В настоящее время развитие авиации характеризуется тем, что от авиационной техники требуется неуклонное повышение эффективности эксплуатации. В связи с этим она становится все более дорогостоящей и специализированной. Эта тенденция требует от разработчиков минимизации запасов в расчетах не только прочности конструкции, но и показателей безопасности эксплуатации. От эксплуатационников требуется все более грамотная организация работы, обеспечивающая максимум эффективности при безусловном выполнении требований безопасности полетов. Таким образом, появляется настоятельная необходимость применения таких научно-технических методов, которые позволяют с малыми затратами получить как можно более точные характеристики движения ВС. Одним из таких методов является математическое моделирование.
Предлагаемый подход к решению этой проблемы включает в себя несколько принципиальных моментов[1].
1. Использование для анализа упругой работы планера конечно–элементных моделей.
2. Построение нелинейных математических моделей стоек шасси с использованием физических и конструктивных параметров стоек, что позволяет избежать значительного количества допущений при анализе.
3. Решение уравнений движения самолета в пространстве собственных форм колебаний планера дополненном пространством переменных интегрирования стоек. Это дает возможность, во-первых, учесть требуемое количество собственных форм для достижения необходимого приближения, а во-вторых, позволяет проводить расчет практически в реальном времени. В результате интегрирования уравнений определяются расчетные параметры в стойках и реакция планера в виде вкладов собственных форм. На следующем шаге вычисляются перемещения, скорости и ускорения точек упругой модели планера и эквивалентные статические нагрузки, как функции времени.
Особенность пространства переменных расчетной модели, отмеченная в последнем пункте, позволяет ввести термин – двухкомпонентная система. Первая компонента – линейная подсистема, описанная в ортогональном пространстве обобщенных переменных, и вторая – подсистема произвольных нелинейных элементов, заданная в пространстве физических переменных. Применение двухкомпонентных систем (ДКС) позволяет максимально корректно решать следующие задачи.
1. Анализ расчетных нагрузок на стойки шасси и конструкцию планера в случаях посадки.
2. Анализ расчетных нагрузок на стойки шасси и конструкцию планера в случаях пробега
по полосе с заданным профилем неровности, в том числе по грунтовой полосе.
3. Определение стояночных нагрузок на стойки как функции массы и центровки для самолетов с многостоечным шасси.
4. Проверка ограничений на расчетные параметры стоек, такие как работоемкость стойки, предельная нагрузка, предельный ход амортизатора и другие.
5. Оптимизация параметров амортизатора и опоры шасси по условию минимизации уровня нагрузок в конструкции планера при заданных ограничениях. Эти задачи возникают при расширении требований к самолету в процессе сертификации, а также при переходе на большие массы с сохранением прежних параметров стоек шасси. В некоторых случаях, как будет показано ниже, учет упругости планера позволяет снизить нагрузки со стороны шасси на планер и инерционные нагрузки на фюзеляже на 10–15%.
При проектировании новых самолетов предлагаемая методика позволяет оперативно просматривать большое количество схем шасси с тем, чтобы выбрать наиболее подходящую по уровню нагрузок.
Разумеется, интерес представляет задача проектирования стоек шасси, которая в данном случае может быть решена без создания неоправданных запасов сразу для требуемой предельной массы самолета.
Важным моментом применения математических моделей для определения нагрузок, является их верификация путем сравнения с летным экспериментом. В работе приводится ряд примеров моделирования летного эксперимента.
Амортизатор опоры шасси – однокамерный, плунжерного типа, с перетеканием жидкости через отверстие (рис.1).
Для
разделения уравнений движения переменные интегрирования определяются
в осях стойки [1]. В качестве переменных интегрирования выбирается
вектор v =
{![]() ,
,![]() ,ξ,η,ω}t
.
,ξ,η,ω}t
.
Здесь ξ, η – перемещения оси колес в системе координат стойки, ω – угловая скорость вращения колес.
Перемещения узлов крепления стойки 1 и 2 используются:
- для определения расстояния от оси колес до опорной поверхности и вычисления обжатия пневматика δp, которое определяет кинематическое возбуждение стойки;
- для вычисления угла поворота местной системы координат (МСК) стойки α;
-
для вычисления S
и
![]() – обжатия и скорости обжатия амортизатора;
– обжатия и скорости обжатия амортизатора;
- для вычисления прогиба стойки δ.
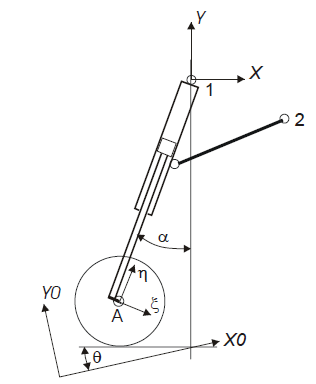
Рисунок 1 - Амортизационная стойка самолета.
Поперечная
жесткость стойки определяется нелинейной зависимостью
kξ
= kξ
(S).
Заданными параметрами являются:
m – масса подвижной части, ν – логарифмический декремент затухания,
p0, V0 – начальное давление и объем в газовой камере амортизатора,
fop – площадь отверстия прямого хода, fok – площадь отверстий обратного хода, Fr – площадь штока, Fpl – площадь плунжера, Fok – площадь камеры обратного хода, pa – атмосферное давление, μb, μm – коэффициенты трения в буксах и манжетах, μk – коэффициент трения качения, rk – радиус колес,
Jk – массовый момент инерции колес.
Дифференциальные уравнения записываются в виде [1]:
1. Ускорение движения точки A вдоль оси ξ:
![]() =
(Tξ
− (ν
kξm
/ π)
=
(Tξ
− (ν
kξm
/ π)
![]() − kξδ)/m
− kξδ)/m
2. Ускорение движения точки A вдоль оси η:
![]() =
(Tη
−Qa
−Qg
−Qf
)/m
=
(Tη
−Qa
−Qg
−Qf
)/m
3. Уравнение раскрутки колес:
![]() =
(Tx0μ(rk
−
δp
) −Tx0μk
(rk
−
δp
/ 3)) /
Jk
.
=
(Tx0μ(rk
−
δp
) −Tx0μk
(rk
−
δp
/ 3)) /
Jk
.
Здесь Tξ иTη – внешняя сила в проекции на оси стойки:
Tξ = (Ty0 −mg) cos(θ + α) +Tx0 sin(θ + α)
Tη = −(Ty0 −mg)sin(θ + α) +Tx0 cos(θ + α)
Прогиб и относительная скорость в точке A:
δ = ξ − x1 cosα
![]() =
=
![]() −
−
![]() cosα
cosα
Реакция земли T0 = {Tx0 ,Ty0} является функцией обжатия пневматика δp и коэффициентов трения проскальзывания μp:
Ty0 = Ty0(δp ) – функция обжатия пневматиков,
- Компоненты реакции амортизатора:
Упругая
сила, Qa
= (
p1
− path
)Fr
,
![]()
Сила гидравлического сопротивления при перетекании жидкости через отверстие.
Сила гидравлического сопротивления на прямом ходе
Qg
= ΔpgFpl,
![]()
ν1 – скорость перетекания жидкости через отверстие прямого хода;
Сила трения в уплотнительных манжетах амортизатора и буксах:
![]()
здесь a и b – соответственно расстояния от оси колеса до нижней буксы и между буксами.
Компоненты реакции стойки на оси колеса в системе координат стойки:
Pξ
= kξδ
или Pξ
= Tξ-m![]()
Pη
= Qa
+Qg
+Qf
или Pη
= Tη
−m![]()
Компоненты реакции стойки на оси колеса в системе координат самолета:
Px = Pξ cosα + Pη sinα
Py = −Pξ sin α + Pη cosα
Вектор реакций в узлах крепления стойки к фюзеляжу вычисляется в соответствии с уравнениями статического равновесия.
Для расчета эффективности по предложенной модели выполняется расчет носовой стойки тяжелого беспилотного самолета.
Записывается уравнение равновесия для стойки (сумма моментов относительно шарнира О1 равна нулю):
![]() ;
;
Проекции силы S на оси координат X и Z равны:
![]() кН.
кН.
Изгибающий момент Мx , действующий в плоскости ZOY , постоянен по длине стойки и равен величине:
![]() кН∙м.
кН∙м.
Изгибающий момент МY , действующий в плоскости XOY и в шарнире О1 его значение равно нулю. В точках G и А значение МY равно:
![]() кН∙м;
кН∙м;
![]() кН∙м.
кН∙м.
Сила SZ приложена с эксцентриситетом:
![]() кН∙м;
кН∙м;
![]() кН∙м.
кН∙м.
Стойка состоит из штока и цилиндра, связанных между собой буксами – силовая схема. Момент МY для штока равен нулю в точке С, а момент МY для цилиндра – нулю в точке D.
Крутящий
момент равен:
![]() кН∙м.
кН∙м.
Спроектированная с помощью математических моделей амортизационная стойка имеет большую энергоемкость, обеспечивая снижение амплитуды колебаний и динамических нагрузок передающихся на узлы крепления стойки к планеру самолета на 10–15%.
При проектировании новых самолетов предлагаемая методика позволяет оперативно просматривать большое количество схем шасси с тем, чтобы выбрать наиболее подходящую по уровню нагрузок.
Работа выполнена при финансовой поддержке Минобрнауки РФ.
Литература:
Динамический анализ самолета на земле. Рычков С.П. Самарский областной центр новых информационных технологий: 2008 г. – 78 стр.
Конструкции и прочность самолетов В.Н. Зайцев, Киев: 1974 – 488 стр.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1966. - 992 с.
Расчет шасси самолета на прочность: Учеб.пособие/ Л.А. Евсеев, К.В. Миронов, П.А. Фомичев. – Харьков: Харьк.авиац.ин-т, 1988.
Бехтина Н Б, Кубланов М С Факторы, определяющие взаимодействие авиационного шасси с взлетно-посадочной полосой U Научный вестник МГТУ ГА Сер Аэромеханика и прочность (М) - 2005 - Ki 81(1,1) -С 80-86
