





Одним из важнейших механических факторов, влияющих на работу коллекторно-щеточного узла машин постоянного тока (МПТ), является профиль коллектора. Поэтому оценка технического состояния этого узла является важной задачей на всех этапах жизненного цикла машины. Например, анализ профиля коллектора тягового электродвигателя (ТЭД) после капитального ремонта в условиях локомотивного депо позволяет сделать заключение о качестве ремонта коллектора ТЭД [1, с. 418-421].
Из множества методов контроля профиля коллектора как в статических, так и в динамических режимах работы МПТ можно выделить вихретоковый метод, который нашел применение в приборе ПКП-4М, разработанном на кафедре «Электрические машины и общая электротехника» ОмГУПСа [2, с. 147]. Функциональная схема прибора приведена на рис. 1.
![]()
ГВС – генератор высокочастотного сигнала; ИП – измерительный преобразователь; КП – компенсационный преобразователь; Д1, Д2 – детекторы; ДУ – дифференциальный усилитель; УПТ – усилитель постоянного тока; ФИС – формирователь импульсов считывания; АЦП – аналогово-цифровой преобразователь; ЦН – цифровой накопитель
Рис. 1 – Функциональная схема прибора ПКП-4М
Датчиком прибора является дифференциальный вихретоковый параметрический преобразователь перемещений контролируемой поверхности, осуществляющий амплитудную модуляцию высокочастотного сигнала в функции расстояния между преобразователем и поверхностью. Осциллограмма сигнала с выхода схемы измерения приведена на рис. 2.

Рис. 2 – Осциллограмма профиля коллектора
Вследствие краевого эффекта вихретокового датчика сигнал от каждой коллекторной пластины имеет колоколообразную форму (рис. 3). Однако при определении профиля коллектора интерес представляет не форма этого сигнала, а его амплитудное значение. Для выделения максимальных значений в приборе предусмотрены блок формирователя импульсов считывания ФИС и аналогово-цифровой преобразователь АЦП.
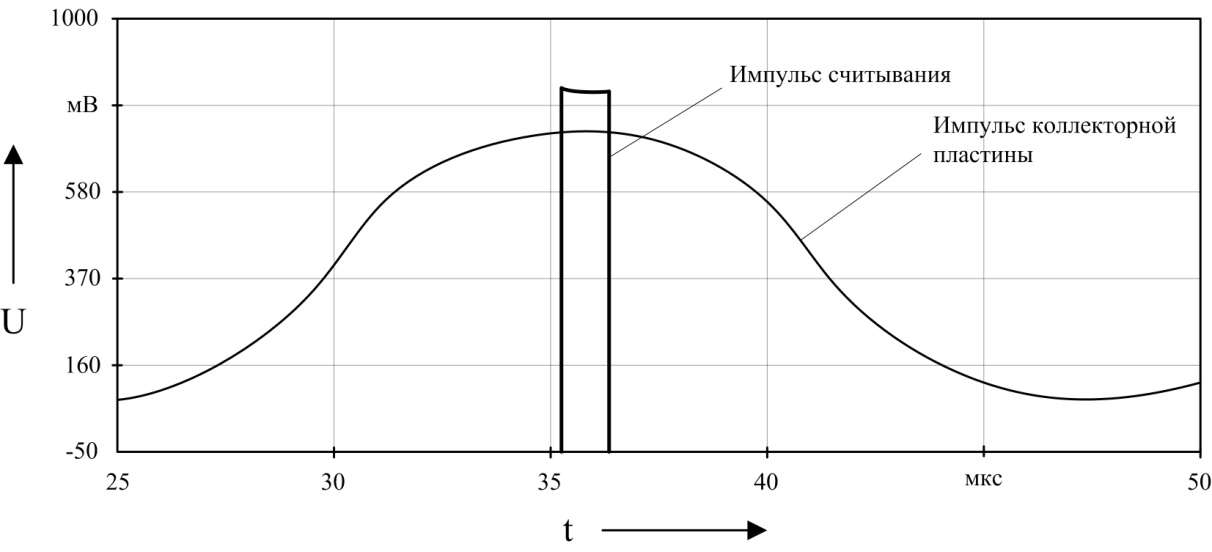
Рис. 3 – Фрагмент сигнала профиля коллектора
Сигнал старта работы АЦП вырабатывается блоком ФИС, схема которого приведена на рис. 4.
Дифференциальный усилитель ДУ вырабатывает сигнал пропорциональный первой производной входного сигнала. Компараторы К1 и К2, сравнивая этот сигнал с величинами опорных напряжений, формируют прямоугольные импульсы соответственно по фронту и срезу сигналов, поступающих на схему ФИС. Импульсы с выхода RS-триггера и инвертора поступают на входы схемы совпадения СС. На выходе этой схемы формируются стробирующие импульсы считывания. Фазовый сдвиг между этими импульсами и импульсами на выходе схемы измерения зависит от соотношения опорных напряжений компараторов, которые устанавливаются таким образом, чтобы фронт стробирующего импульса считывания совпадал с максимумом импульса схемы измерения.


ДУ – дифференцирующее устройство, К1 и К2 – компараторы, Инв – инвертор,
СС – схема совпадения
Рис. 4 – Схема формирователя импульсов считывания
Отрицательным свойством схемы ФИС является то, что совпадение фронта импульса считывания с максимальным значением сигнала от измерительного преобразователя достигается лишь при определенной частоте вращения якоря электродвигателя. Фрагмент сигнала с выхода схемы измерения при частоте вращения приводного электродвигателя 1840 об/мин приведен на рис. 3. При изменении частоты вращения якоря МПТ фронт импульса считывания смещается относительно максимального значения (рис. 5), что может привести к появлению погрешности измерения.
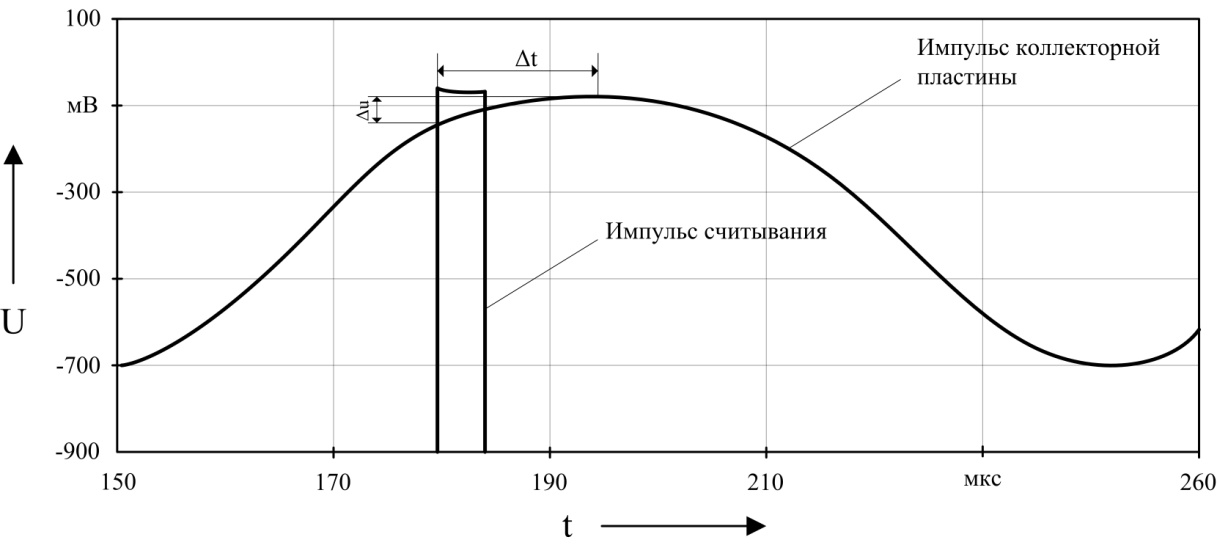
Рис. 5 – Фрагмент сигнала профиля коллектора при частоте вращения 516 об/мин
Для устранения этого недостатка было предложено сигнал с выхода измерительной схемы непрерывно оцифровывать при помощи быстродействующего АЦП с последующей программной обработкой полученных данных.
Для проверки предложенного метода обработки аналогового сигнала профиля проведены экспериментальные исследования коллектора машины постоянного тока серии 2П. Схема экспериментальной установки приведена на рис. 6.
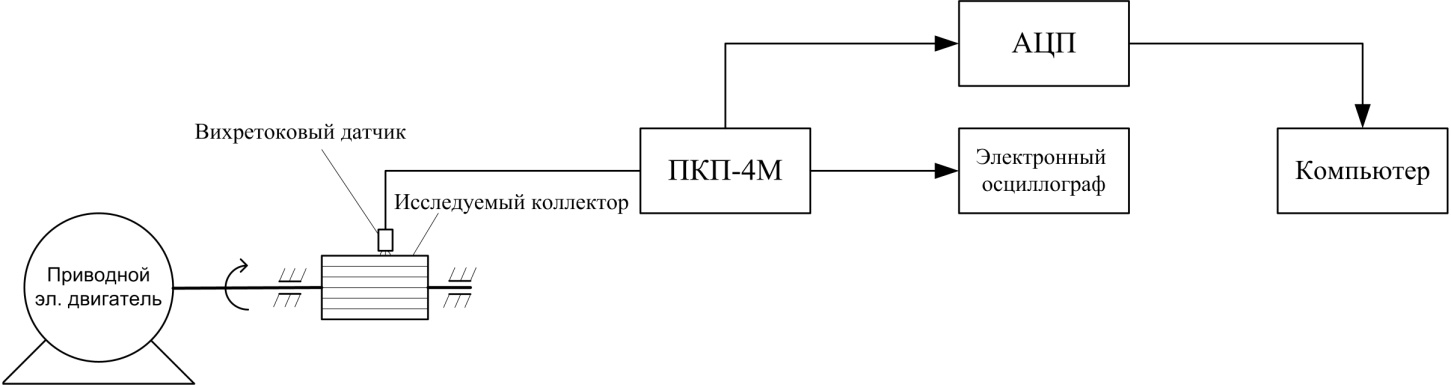
Рис. 6 – Схема испытательной установки
В ходе эксперимента при различных частотах вращения приводного электродвигателя регистрировались профилограммы исследуемого коллектора двумя способами:
– при помощи прибора ПКП-4М с последующей записью его во встроенное ОЗУ и передачей на компьютер – метод с формированием импульсов считывания;
– преобразованием аналогового сигнала, соответствующего профилю, в цифровой сигнал при помощи быстродействующего АЦП с последующей передачей его на компьютер и программной обработкой – метод непрерывной оцифровки.
Обработка экспериментальных данных осуществлялась при помощи программы, позволяющей определять значения, соответствующие максимумам коллекторных пластин (рис. 7). Алгоритм поиска максимумов, приведенный на рис. 8, основан на сравнении каждого значения исходного массива с предшествующим и последующим значением.
На рис. 9 приведен профиль коллектора, полученный при помощи метода с формированием импульсов считывания (кривая 1). Частота вращения приводного электродвигателя при этом была минимальной и составляла 516 об/мин, что соответствует коллекторной частоте nk = 619,2 Гц. После реализации программы был получен профиль при той же частоте вращения приводного электродвигателя (рис. 9, кривая 2). Графики функций в данном случае существенно отличаются из-за влияния методической погрешности первого метода, описанной выше.
На рис. 10 приведены профилограммы исследуемого коллектора при частоте вращения приводного электродвигателя 2160 об/мин. Как видно из рисунка методическая погрешность метода с использованием импульса считывания при этом значительно уменьшается. Графики функций профиля коллектора имеют несущественные различия.
С увеличением частоты вращения приводного электродвигателя выше 2160 об/мин методическая погрешность, связанная с методом, использующим формирующие импульсы, вновь увеличивается. Это связано с тем, что при частотах вращения, превышающих 1500 об/мин формирующий импульс смещается вправо относительно максимума коллекторной пластины.
-
Рис. 7 – Алгоритм
работы Рис. 8 – Блок-схема алгоритма
- программы определения максимальных значений
- программы определения максимальных значений

1 – метод с управляющими импульсами, 2 – метод непрерывной оцифровки
Рис. 9 – Графики функций профиля коллектора при частоте вращения 516 об/мин

1 – метод с управляющими импульсами, 2 – метод непрерывной оцифровки
Рис. 10 – Графики функций профиля коллектора при частоте вращения 2160 об/мин
Отклонения между высотами коллекторных пластин, полученными методами формирования импульсов считывания и непрерывной оцифровки определяем по выражению [3, с. 194-195]:
![]() (1)
(1)
где – высоты коллекторных пластин, полученные методом с использованием формирующего импульса,
![]() – высоты коллекторных
пластин, полученные методом
с использованием непрерывной оцифровки.
– высоты коллекторных
пластин, полученные методом
с использованием непрерывной оцифровки.
i – номер коллекторной пластины.
Степень различия данных, полученных двумя методами, по всей длине коллектора исследуемой МПТ определяем по выражению:
![]()
![]()
где n – количество коллекторных пластин.
Рис. 11 – График изменения отклонения двух методов
Из рис. 11 видно, что существующий метод оценки состояния рабочей поверхности коллектора вносит минимальную методическую погрешность только при частоте вращения якоря исследуемого двигателя близкой к номинальной. В данном случае минимальное отклонение графиков функций профиля коллектора Δ = 0,97 мкм, полученных двумя рассматриваемыми методами, будет наблюдаться при коллекторной частоте равной 1958,4 Гц, что соответствует частоте вращения якоря 1632 об/мин. При уменьшении или увеличении частоты вращения, без дополнительной подстройки прибора, полученные данные будут значительно отличаться от реального профиля вследствие присутствия погрешности, вносимой существующим методом обработки аналогового сигнала профиля коллектора, связанного с несовпадением фронта импульса считывания и максимального значения коллекторной пластины.
Предложенный метод непрерывной оцифровки с последующей программной обработкой аналогового сигнала, соответствующего поверхности коллектора, позволяют регистрировать профиль независимо от частоты вращения якоря МПТ. Реализовав данный метод в существующем приборе, становится возможным оценивать профиль коллектора как в динамическом, так и в статическом режиме с меньшей погрешностью.
Литература:
Современные техника и технологии: Сборник трудов XVI международной научно-практической конференции студентов, аспирантов и молодых ученых. В 3 т. Т.1 / Национальный исследовательский Томский политехнический университет. Томск, 2010. 511 с.
Харламов В. В. Методы и средства диагностирования технического состояния коллекторно-щеточного узла тяговых электродвигателей и других коллекторных машин постоянного тока: монография / В.В. Харламов; Омский гос. ун-т путей сообщения. Омск, 2002. 233 с.
Новицкий П. В. Оценка погрешностей результатов измерений / П. В. Новицкий, И. А. Зограф – Л.: Энергоатомиздат. Ленингр. Отд-ние, 1985. – 248 с.
