




Данная работа посвящена модели синтеза визуального представления пространственных отношений по текстовому описанию ситуации.
Проведенный анализ существующих подходов к визуализации текстового описания пространственных отношений показал необходимость их модернизации. В частности, наиболее близкий аналог «Анализ пространственной лексики» не предоставляет возможность автоматического определения объектов ситуации.
Сравнительный анализ существующих классификаций пространственных отношений показал, что для случая статической ситуации и неподвижного наблюдателя они являются эквивалентными. Однако классификация Гака В.Г. предлагает наиболее формализованную и полную модель пространственного отношения, что и определило ее использование в данной работе.
В. Г. Гак определяет пространственное отношение в чистом виде формулой
<S, V, R, L>,
где:
S — локализуемый объект,
V — глагол, в значение которого может входить пространственная схема (это, прежде всего, глаголы местопребывания и движения),
R — конкретный тип локализации, выражаемый, например, предлогом,
L — локализатор, то есть двухмерное или трехмерное пространство, в котором способен помещаться локализуемый объект.[1]
Для статической ситуации локализации (местонахождения) схему пространственных отношений можно представить следующим образом:
Алгоритм синтеза визуального представления ситуации должен на основе входящих данных генерировать трехмерную модель, описывающую пространственные отношения между объектами ситуации.
Входные данные: текстовое описание ситуации на ограниченном естественном языке, банк слов, БД прецедентов, БД моделей.
Выходные данные: 3D модель пространственных отношений.
В задачи алгоритм синтеза визуального представления ситуации входит:
1) Выявление пространственных отношений;
2) Построение графического представления.
Требования к входному тексту:
– текст должен описывать только одну ситуацию
– описание пространственной ситуации должно быть конечно;
– текст должен описывать статическую ситуацию с точки зрения неподвижного наблюдателя;
– описание пространственной ситуации должно быть не противоречивым.
Грамматика входного языка:
1. < Текст>→<S><V><R><L>.<Текст>
2. < Текст>→<R><L><V><S>.<Текст>
3. < Текст>→<S><R><L>.<Текст>
4. < Текст>→<R><L><S>.<Текст>
5. < Текст>→ε
6. <S>→<PS><существительное>
7. <PS>→<PS><прилагательное>
8. <PS>→ε
9. <S>→<местоимение-существительное>
10. <S>→<местоименное прилагательное><PS><существительное>
11. <R>→<AR><отношение>
12. <AR>→<наречие><AR>
13. <AR>→ε
14. <V>→<глагол>
15. <L>→<PL><существительное>
16. <PL>→<PL><прилагательное>
17. <PL>→ε
Поставленные задачи предполагают, что алгоритм должен транслировать данные в модель пространственных отношений Гака, вследствие чего было принято решение использовать автомат для разбора входного языка как наиболее эффективный метод решения данной задачи.
В качестве метода хранения данных была выбрана семантическая сеть, как наиболее удобный вариант хранения описания ситуации.
Геометрическая модель строится при помощи рассуждений по прецедентам, так как эта модель рассуждений наиболее близкая к решению данной задачи человеком.
Модель синтеза визуального представления текстового описания пространственных отношений представлена на рисунке 1 в виде потоковой диаграммы.
Блок «Выявление морфологических признаков» использует морфологический словарь ДИАЛИНГ. Его основные характеристики приведены в [3].
На выходе формируется таблица лексем, количество строк которой равно количеству слов и точек в наборе символов.
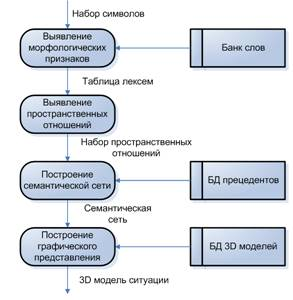
Рисунок 1 – DFD диаграмма синтеза визуального представления ситуации.
Блок «Выявление пространственных отношений» получает на вход данную таблицу лексем. Задачей блока является выявление пространственных отношений соответственно модели Гака, что делается с помощью автомата. На рисунке 2 изображен граф переходов. На выходе блока таблица пространственных отношений.
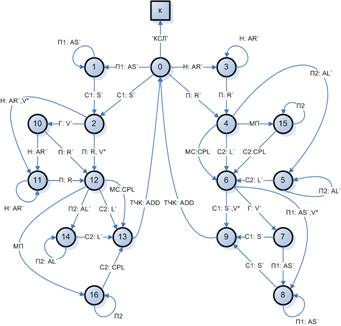
Рисунок 2 – Граф переходов автомата выявления пространственных отношений.
|
Список лексем: |
Список действий |
|
С1 – сущ. им. С2 – сущ. не им. П1 – прил. им. П2 – прил. не им. Г – глагол Н – наречие П – предлог MC – местоимение-существительное МП – местоимение-предлог ТЧК – знак «точка» КСЛ – конец списка лексем |
S` – записать лексему как локализуемый объект V` – записать лексему как глагол R` – записать лексему как пространственное отношение L` – записать лексему как локализатор CPL – скопировать предыдущий локализатор AS` – добавить лексему в список атрибутов локализуемого объекта AL` – добавить лексему в список атрибутов локализатора AR` – добавить лексему в список атрибутов отношения ADD – добавить пространственное отношение в таблицу |
Задачей блока 3 является построение семантической сети, описывающую ситуацию в виде таблицы концептов и таблицы дуг.
Семантическая сеть из набора пространственных отношений строится по следующим правилам:
1. Множеству концептов семантической сети соответствует множество объектов ситуации (локализуемые объекты и локализаторы);
2. Множеству дуг семантической сети соответствует множество пространственных отношений;
3. Дуга семантической сети направляется от локализуемого объекта к локализатору.
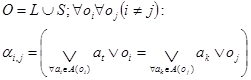
Для выявления объектов ситуации используется матрица попарных сравнений, каждый элемент которой вычисляется по формуле:
Для визуализации каждого пространственного отношения используется рассуждение по прецедентам:
|
Описание случая (проблемы): |
Модель пространственного отношения <S,V,R,L> |
|
Описание решения проблемы: |
<X,Angle,Ms,Ml> где: X — координаты локализуемого обьекта в локальной системе координат локализатора Angle — углы поворота модели локализуемого объекта Ms — ссылка на модель локализуемого объекта в БД моделей Ml — ссылка на модель локализатора в БД моделей |
Для оценки близости пространственного отношения <S,V,R,L> и i-того случая из БД прецедентов используется мера f:
ai,j и f построены на основе нечеткой литерной логики, описанной в [2].
При построении графического представления ситуации происходит геометрическая оптимизация полученной модели – ищется минимум критерия с:

где:
X – множество положений объектов сцены,
P – множество пространственных отношений сцены,
r(pi) – расстояние между текущим положением локализуемого объекта pi пространственного отношения и заданным в решении
O – множество объектов сцены,
d(oi ,oj ) – штрафная функция, зависящая от близости i-того и j-того объекта сцены.
Прототип системы был реализован с использованием графической библиотеки «IRRLicht».
Пример работы.
На вход подается описание ситуации «лампа стоит на столе. слева от стола стоит кресло. справа от стола стул. человек стоит за столом.».
Построенная семантическая сеть изображена на рисунке 3.

Рисунок 3 – Семантическая сеть описывающая ситуацию.
Результат работы программы приведен на рисунке 4.
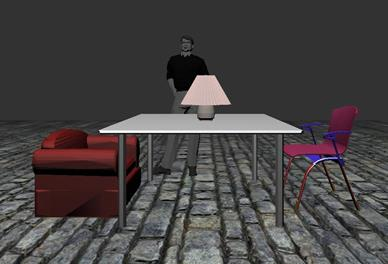
Рисунок 4 – Визуальное представление ситуации.
Литература:
1. Гак, В.Г. Пространство вне пространства / В. Г. Гак // Логический анализ языка. Языки пространств. – 2000. – №5. – С. 127-134.
2. Прохоров, И. В. Автоматизация этимологического анализа: Автореф… дис. канд. техн. наук / И. В. Прохоров. – ВолгГТУ. – Волгоград, 2007.– 20с.
3. Русский морфологический словарь Диалинг [электронный ресурс]. – Режим доступа: http://aot.ru/docs/rusmorph.html .
