





Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, неосуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины – выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта – управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления [1].
Автоматическое управление – совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
Автоматизация технологических процессов является одним из решающих факторов повышения производительности и улучшения условий труда. Все существующие и строящиеся промышленные объекты в той или иной степени оснащаются средствами автоматизации.
Проектами наиболее сложных производств, особенно в черной металлургии, нефтепереработке, химии и нефтехимии, на объектах производства минеральных удобрений, энергетики и в других отраслях промышленности, предусматривается комплексная автоматизация ряда технологических процессов [1].
Средства автоматизации применяются также на объектах жилищного строительства и социально-бытового назначения в системах кондиционирования воздуха, дымоудаления. энергоснабжения и т. п.
Средства автоматического управления различными объектами непрерывно развиваются, в их состав попадают все более современные разработки. В последнее время широко распространилась технология передачи данных Wi-Fi. Данная технология позволяет передавать на достаточно большой скорости значительные объемы информации и, что самое ценное, без использования проводных линий связи. Также существуют и системы управления процессами в реальном времени и сбора данных, называемые SCADA – системами (англ. Supervisory Control And Data Acquisition - диспетчерское управление и сбор данных).
Основные задачи, решаемые SCADA-системами [2]:
1. Обмен данными с устройствами связи с объектом, (т. е. с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
2. Обработка информации в реальном времени.
3. Отображение информации на экране монитора в понятной для человека форме.
4. Ведение базы данных реального времени с технологической информацией.
5. Подготовка и генерирование отчетов о ходе испытательного процесса.
6. Осуществление сетевого взаимодействия между SCADA ПК.
7. Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.).
Одним из представителей систем автоматического проектирования различных компьютерных контрольно-измерительных систем является язык LabView (Laboratory Virtual Instrument Engineering Workbench), разработанный фирмой National Instruments (США). Также данная фирма занимается разработкой средств автоматизации реального времени на базе программируемых логических интегральных схем (ПЛИС) CompactRIO.
CompactRIO представляет собой надежную промышленную компактную систему управления и сбора данных, возможности которой расширены, благодаря ПЛИС и технологии реконфигурируемого ввода/вывода (reconfigurable input/output – RIO). Продукты линейки CompactRIO отличаются высокой производительностью и гибкостью настройки, а также позволяют создавать пользовательские контрольно-измерительные системы. NI CompactRIO сочетает в себе процессор реального времени и реконфигурируемую ПЛИС, позволяющие создавать автономные встраиваемые и распределенные приложения, а также промышленные модули ввода/вывода со встроенным согласованием сигналов, возможностью прямого подключения датчиков и поддержкой горячего подключения [2].
В качестве примера рассмотрим автоматизацию управления серводвигателем Pittman (рис.1), основные характеристики которого приведены в таблице 1.

Рис. 1 – Автоматизированная система управления серводвигателем, где
1 – блок питания, 2 – шасси CompactRIO с модулем управления серводвигателем, 3 – серводвигатель Pittman
Таблица 1 – Характеристики серводвигателя Pittman
|
Потребляемое напряжение, В |
24 |
|
Вес, г |
283 |
|
Скорость вращения без нагрузки, рад/с |
735 |
|
Инерция ротора, кг/м2 |
|
|
Потребляемая сила тока без нагрузки, А |
0,16 |
|
Количество каналов энкодера |
3 |

Шасси CompactRIO подключается к ПК, с которого осуществляется управление посредством кабеля RJ-45, затем в шасси записывается программа управления, обеспечивающая выполнение команд в реальном времени, после чего управление серводвигателем может осуществляться непосредственно с ПК пользователя.
В случае подключения нескольких шасси CompactRIO и нескольких ПК, размещенных на расстоянии друг от друга использование кабеля RJ-45 нерационально, т.к. требует прокладки кабеля от конкретного ПК к конкретному шасси и не предоставляет пользователю право выбора шасси, к которому он хочет обратиться. Схема, позволяющая осуществить удаленное беспроводное управление объектом с возможностью выбора объекта управления, показана на рис. 2.
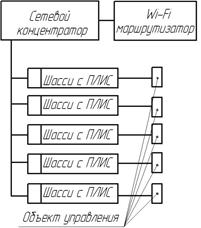
Рисунок 2 – Схема организации удаленного управления объектом
Согласно данной схеме, все шасси (в данном случае их пять), управляющие объектом, подключены к сетевому концентратору, который в свою очередь, подключен к Wi-Fi - маршрутизатору. Такая схема позволяет сконцентрировать объекты управления в определенном месте и позволит обеспечить беспроводное обращение к ним любого ПК, оснащенного оборудованием Wi-Fi. Кроме этого, данная схема позволяет выбор объекта управления, который осуществляется в программе управления объектом управления (в данном случае серводвигателем), написанной в программной среде LabView. На рис. 3 показано окно выбора шасси, управляющего серводвигателем.
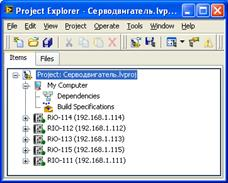
Рисунок 3 – Окно выбора шасси
После выбора объекта управления запускается программа управления серводвигателем, лицевая панель которой показана на рис. 4.
Программа позволяет изменять обороты ротора серводвигателя, а также направление вращения ротора (по часовой стрелке и против часовой).
Программный код, обеспечивающий управление серводвигателем, написанный на языке LabView, находится в 2 файлах и состоит из четырех основных циклов, показанных на рис. 5 и рис. 6.
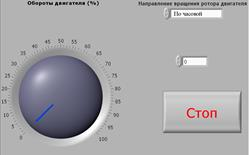
Рисунок 4 – Лицевая панель программы управления серводвигателем
Рис. 5 – Управляющие циклы программы ПЛИС
Рис. 6 – Управляющие циклы программы RealTime
Таким образом, используя современные средства автоматизации, такие как реконфигурируемые шасси CompactRIO в совокупности со средой графического программирования LabView и высокоскоростными сетями Wi-Fi, можно создать надежную и качественную систему, позволяющую удаленно управлять различными объектами.
Литература:
1. Проектирование систем автоматизации технологических процессов: Справочное пособие/А. С. Клюев, Б. В. Глазов, А. X. Дубровский, А. А. Клюев; Под ред. А. С. Клюева.– 2-е изд., перераб. и доп.–М.: Энергоатомиздат, 1990. –464 с: ил.
2. Интернет-ресурс: National Instruments Россия, СНГ и Балтия. www.ni.com
Работа выполнена при финансовой поддержке РФФИ.
