




The paper explored of the problem of designing a control model of the control system of the process of compaction by paver. Developed a simulation model of the control system in MATLAB&Simulink. Performed computer modeling of the control system. A comparative analysis of the transition process.
Keywords: paver, work on, compaction of asphalt mix, fuzzy logic, PI controller
Задачи строительства качественных дорог всегда актуальны, так как от этого зависит множество значимых народно-хозяйственных проблем. Центральная машина дорожно-строительного комплекта асфальтоукладчик обеспечивает укладку, профилирование и предварительное уплотнение слоя асфальтобетонной смеси.
Качество черного покрытия определяется коэффициентом уплотнения асфальтобетонной смеси, зависящим от неоднородности толщины укладываемой смеси и жесткости конструкции уплотняющего оборудования. В процессе уплотнения необходимо обеспечивать управление оборудованием по степени уплотнения смеси. На современных асфальтоукладчиках в качестве такого оборудования применяют техническую систему «брус — плита» [1].
Уплотняющая способность асфальтоукладчиков позволяют обеспечить максимальный коэффициент уплотнения, но ручное управление этим процессом является неэффективным, из-за отсутствия приборов текущего контроля степени уплотнения и большой физической нагрузки на машиниста-оператора при управлении асфальтоукладчиком.
Развитие теории синтеза систем управления дорожно-строительными машинами является актуальной задачей. Разработка имитационной модели системы управления объектом является эффективным инструментом совершенствования САУ технологическими процессами. Использование программной среды MATLAB&Simulink повышает эффективность компьютерного моделирования. Применение нечеткой системы автоматического управления (САУ) процессом позволит решить существующие проблемы за счет использования алгоритмов в соответствии со знаниями опытного эксперта.
Нечеткие системы позволяют повысить качество регулирования и обеспечивают более высокую устойчивость к воздействию возмущающих факторов по сравнению с традиционными САУ.
Целью работы является разработка модели системы управления процессом уплотнения смеси асфальтоукладчиком на основе цифрового и нечеткого регулятора.
Для достижения поставленной цели решены следующие задачи:
– разработка имитационной модели процесса уплотнения асфальто-укладчиком;
– синтез цифровой регулятора [2, 3] рабочим органом асфальтоукладчика;
– построение нечеткого регулятора в среде Simulink;
– моделирование и анализ процесса цифрового и нечеткого управления объектом.
Цель управления объектом заключается в быстром изменении параметров в зависимости от времени, вида и величины возмущающих воздействий и действительного значения регулируемого параметра. Регулируемым парамером является частота трамбования (частота вращения эксцентрикового вала).
Объектом управления является система «гидравлический привод — трамбующий брус — уплотняемая среда». Модель объекта управления разработана средствами Simulink.
В качестве основной входной переменной регулятора рассматривается отклонение частоты вращения от заданного значения, а в качестве управляющего воздействия — изменение расхода рабочей жидкости, подаваемого на гидромотор привода эксцентрикового вала трамбующего бруса рабочего органа укладчика.
Разработаны лингвистические правила управления объектом, сформулирован-ных на основе знаний о динамике процесса, требованиях к его поведению и выражающих технологическую логику профессиональных действий машиниста оператора.
Нечеткая модель содержит следующие блоки:
фаззификатор, преобразующий вектор режимных параметров X в вектор нечетких множеств ![]() , необходимых для выполнения нечеткого логического вывода;
, необходимых для выполнения нечеткого логического вывода;
нечеткую базу знаний,содержащая информацию о зависимости показателей качества Y = f(X) в виде лингвистических правил типа «ЕСЛИ — ТО»;
машину нечеткого логического вывода, которая на основе правил базы знаний определяет значение выходной переменной в виде нечеткого множества
дефаззификатор, преобразующий выходное нечеткое множество ![]() в четкое число Y.
в четкое число Y.
В пакете Fuzzy Logic Toolbox реализованы нечеткие модели двух типов — Мамдани и Сугэно, различающихся форматом базы знаний и процедурой дефаззификации [4].
Реализована система нечеткого логического вывода с алгоритмом Мамдани.
Формально алгоритм Мамдани хорошо изучен и рассмотрен в работах [4–9].
Исходная информация для определения параметров нечеткого регулятора получена в результате моделирования системы с непрерывным регулятором: диапазон изменения входных и выходных переменных (для диапазона изменения соответствующих функций принадлежности).
Настройка нечеткого регулятора может осуществляться:
1) измененяя в модели параметры непрерывного регулятора. Эти изменения отслеживаются сразу по поведению выходных переменных объекта управления;
2) изменяя диапазоны функций принадлежности, число этих функций, правила.
Использование дифференцирующего регулятора. В некоторых случаях можно используя блок-ограничение после численного дифференцирования.
Разработана имитационная модель технологического процесса уплотнения смеси укладчиком. На рис. 1 представлена схема имитационной модели системы управления рабочим органом асфальтоукладчика с нечетким ПИ-регулятором, реализованная в программной среде MATLAB&Simulink.
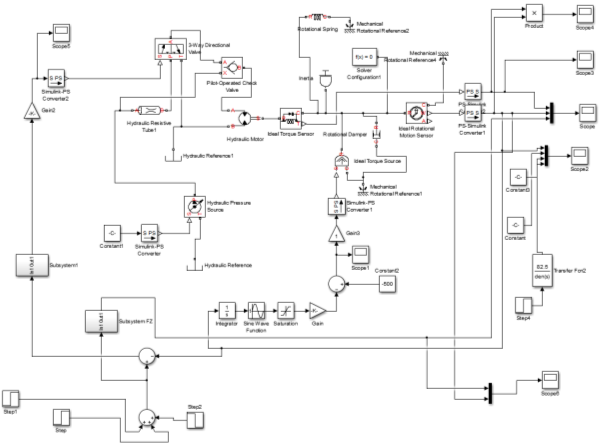
Рис. 2. Имитационная модель системы управления рабочим органом асфальтоукладчика с цифровым и нечетким ПИ-регулятором на языке MATLAB&Simulink
На рис. 2 приведены результаты компьютерного моделирования модели системы управления объектом с цифровым и нечетким ПИ-регулятором. Красным цветом показано изменение угловой скорости на валу гидравлического двигателя во времени при цифровом регулировании, синим цветом — при нечетком регулировании.
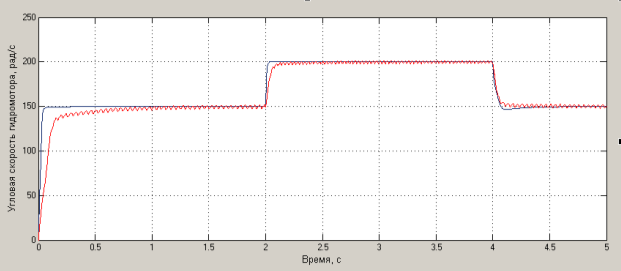
Рис. 2. Изменение угловой скорости гидромотора во времени при цифровом и нечетком регулировании
Моделирование необходимо для определения динамических характеристик и характера динамических процессов.
По результатам моделирования можно отметить, что перерегулирование не наблюдается ни в одной из систем автоматического управления. Время переходного процесса значительно меньше 1 c. Лучший результат по времени переходного процесса показывает система управления на основе нечеткой логики.
Сравнительный анализ систем управления с цифровым и нечетким регуляторами показал, что система с нечетким регулятором предпочтительнее остальных. Для процессов, имеющих повышенную сложность, неопределенность, рекомендуется использование систем управления с интеллектуальными регуляторами.
Литература:
- Справочник по асфальтоукладчикам Vogele. Советы и указания по укладке асфальтобетона асфальтоукладчиками [Электронный ресурс] // Virtgen Group. Режим доступа: http://www.b-construction.ru/assets/files/new-508_spravochnik_Vogele.pdf.
- Говоруха Е. В., Прокопьев А. П., Иванчура В. И. Разработка модели системы управления уплотняющим рабочим органом асфальтоукладчика // Неделя науки СПбПУ: материалы научного форума с международным участием. Институт металлургии, машиностроения и транспорта СПбПУ. Часть 1. — СПб.: Изд-во Политехн. ун-та, 2015. — 344 с.
- Иванчура В. И., Прокопьев А. П., Говоруха Е. В. Имитационная модель цифровой адаптивной системы управления рабочим органом асфальтоукладчика // Свид. о государственной регистрации программы для ЭВМ № 2016611754 от 10.02.2016 г.
- Солдатов В. В., Гончаров А. В. Идентификация нелинейных систем с использованием нечеткого логического вывода // Вестник ФГОУ ВПО «Московский государств. агроинженерный ун-т им. В. П. Горячкина». Выпуск № 3, 2008. С. 76–80.
- Mamdani E. H. Application of fuzzy logic to approximate reasoning using linguistic Systems // Fuzzy Sets and Systems. 1977. vol. 26. pp. 1182–1191.
- Леоненков А. В. Нечеткое моделирование в среде MATLAB и fuzzyTECH. СПб.: БХВ Петербурr, 2005. 736 с.
- Борисов В. В., Круглов В. В., Федулов А. С. Нечеткие модели и сети. М.: Горячая линия — Телеком, 2007. 284 с.
- Штовба С. Д. Проектирование нечетких систем средствами Matlab. 2007. 288 с.
- Гостев В. И. Проектирование нечетких регуляторов для систем автоматического управления. СПб.: БХВ-Петербург, 2011. 416 с.
