




В статье рассматривается актуальность использования методов принятия решений при проектировании систем автоматического управления. Рассмотрены алгоритмы работы метода медианы Кемени и метода Саати, их особенности и применения в различных областях науки и техники. Также рассмотрено конкретное использование этих методов при проектировании системы автоматического управления.
Ключевые слова: регулятор, принятие решений, медиана Кемени, метод Саати, система автоматического управления
В теории автоматического управления, а именно при проектировании и моделировании систем автоматического управления элеткромеханическим приводом возникает такая ситуация, когда к модели привода можно применить несколько видов регуляторов, причем разница в качестве их работы будет не существенна, то есть выбор регулятора представляется затруднительным.
Учитывая вышесказанное, изучение и применение методов принятия решений в условиях неопределенности в рамках данной задачи будут актуальными.
Целью данной статьи является изучение и применение метода медианы Кемени и метода Саати в рамках заданной технической задачи.
Система автоматического управления (САУ)— комплекс устройств, предназначенных для автоматического изменения параметров объекта управления с целью установления требуемого режима его работы [1].
Регулятор — устройство, которое следит за состоянием объекта управления как системы и вырабатывает для нее управляющие сигналы [2].
Регуляторы в подавляющем большинстве работают по принципуотрицательной обратной связис целью компенсировать внешние возмущения, действующие на объект управления и отработать заданный извне или заложенный в системе закон управления (программу). Примером может служить регулятор скоростидвигателя.
Критерии оценки качества регулирования:
‒ скорость регулирования (время уменьшения ошибки регулирования до заданной величины);
‒ точность, как установившаяся ошибка и как величинаперерегулирования;
‒ запасустойчивостии отсутствие колебаний, в том числе затухающих.
Регуляторы подразделяют по нескольким признакам:
‒ По виду закона управления (для линейных регуляторов): П-регуляторы, ПИ-регуляторы, ПИД-регуляторы, ПД-регуляторы, И-регуляторы, Д-регулятор;
‒ По линейности закона управления: линейные и нелинейные регуляторы.
‒ По общему принципу функционирования: адаптивные, модальные, робастные регуляторы и т. д.
В работе мы использовали модель электромеханического привода (рис. 1) созданную в графической среде имитационного моделирования Simulink в пакете прикладных программ для решения задач MATLAB. В ходе моделирования использовались четыре типа регулятора: П-регулятор, ПИ-регулятор, ПИД-регулятор и регулятор на нечеткой логике. Результаты работы данных регуляторов представлены на рис. 2–5.
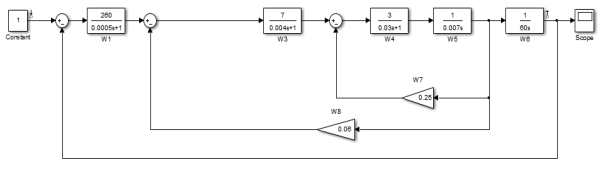
Рис. 1. Модель электромеханического привода
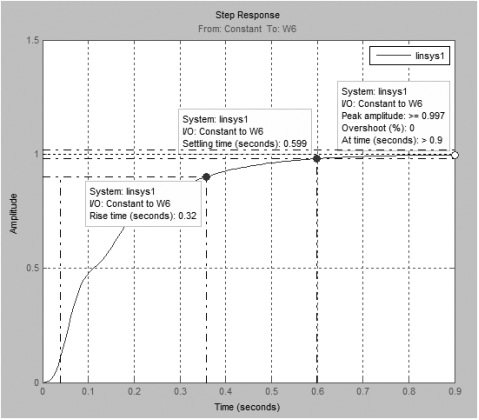
Рис. 2. Переходный процесс при использовании П-регулятора
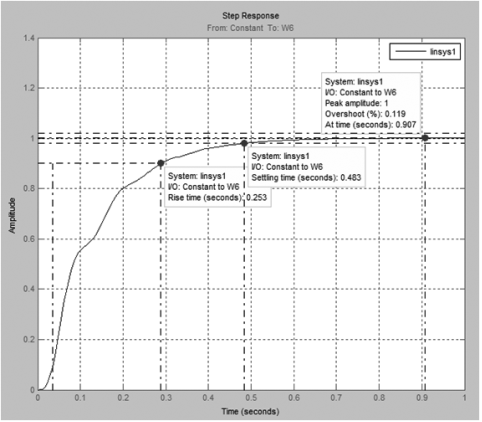
Рис. 3. Переходный процесс при использовании ПИ-регулятора
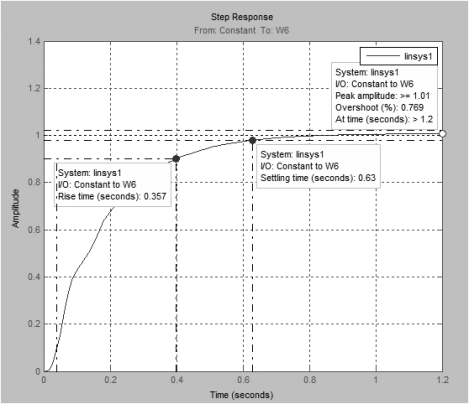
Рис. 4. Переходный процесс при использовании ПИД-регулятора
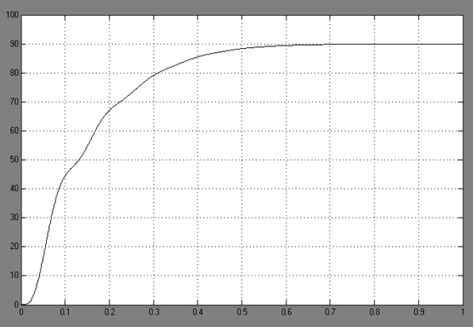
Рис. 5. Переходный процесс при использовании нечеткого регулятора
Критериями оценки качества работы являются: время нарастания (risetime), время регулирования (settlingtime), перерегулирование (overshoot) и статическая ошибка (staticerror).
По полученным переходным процессам видим, что критерии качества работы у каждого регулятора приблизительно одинаковы. Поэтому для выбора регулятора мы прибегнем к использованию методов принятия решений в условиях неопределенности.
Приоритетный критерий качества работы регулятора будем выбирать при помощи метода медианы Кемени.
Метод поиска медианы Кемени позволяет найти такое итоговое ранжирование P, суммарное расстояние от которого до всех заданных ранжирований минимальное.
Для данного метода были опрошены 5 экспертов. Результаты их опроса были занесены в таблицу (рис. 6). И по этим данным в прикладном программном обеспечении было построено итоговое ранжирование (рис. 7).
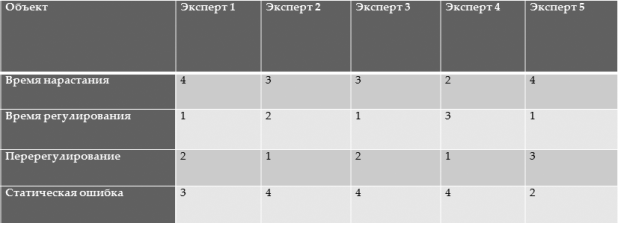
Рис. 6. Ранжирование экспертов
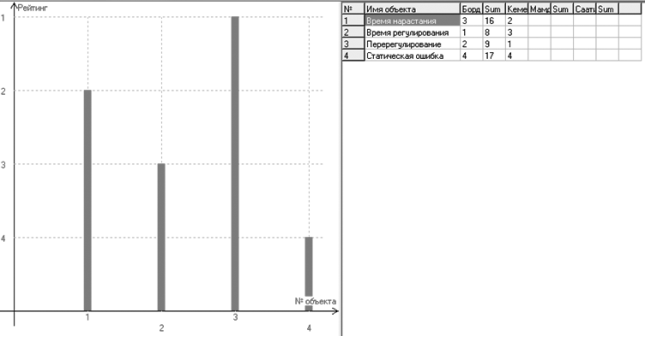
Рис. 7. Итоговое ранжирование по методу медианы Кемени
По итоговому ранжированию видим, что на первом месте находится перерегулирование, на втором — время нарастания, на третьем — время регулирования, на четвертом — статическая ошибка.
Опираясь на полученное ранжирование воспользуемся методом Саати для ранжирования регуляторов.
Основная идея метода анализа иерархий (МАИ) Саати заключается в том, что проблема исследования декомпозируется на отдельные части и представляется в виде иерархии. При этом происходит структурирование и упрощение проблемы. Иерархия содержит на верхнем уровне цель, на нижележащих уровнях — подцели и критерии. Результатом работы являются значения многомерной функции, построенной для данной иерархии [3].
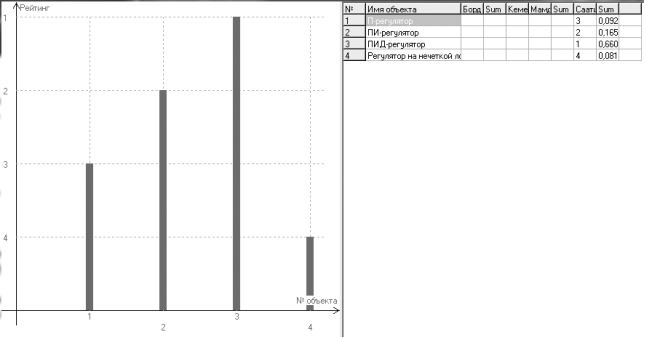
Рис. 8. Ранжирование по методу Саати
В соответствии с ранжированием по методу Саати на первом месте находится ПИД-регулятор, на втором — ПИ-регулятор, на третьем — П-регулятор, на четвертом — регулятор на нечеткой логике.
Литература:
- Бесекерский В. А., Попов Е. П. Теория систем автоматического управления. — Изд. 4-е, перераб. и доп. — СПб, Изд-во «Профессия», 2003. — 752 с.
2. Дорф Р., Бишоп Р. Современные системы управления, — М.: Лаборатория базовых знаний, 2002. — 832 с.
- Николаева М. А., Зотова О. Ф. Методы и алгоритмы принятия решений в примерах и задачах: учебное пособие, — Уфимск. гос. авиац. тенх. ун-т, — Уфа, 2009. — 109 с.
