




В данной статье представлены результаты экспериментальных исследований системы автоматического управления (САУ) малоразмерных газотурбинных двигателей (МГТД) с электроприводным топливным насосом-дозатором, в которой управление производительностью насоса-дозатора, осуществляющего управление режимом авиадвигателя, выполняется путём прямого изменения частоты вращения электродвигателя постоянного тока (бесколлекторного электродвигателя).
Ключевые слова: газотурбинный двигатель, топливная система, система автоматического управления, насос-дозатор
В настоящее время в автоматике большинства авиационных газотурбинных двигателей применяются приводные топливные насосы регулируемой производительности, что приводит к усложнению САУ из-за необходимости применять устройства разрыва положительной обратной связи между регулируемым параметром — частотой вращения ротора и регулирующим фактором — расходом топлива. Для перспективных САУ типа FADEC (FullAuthorityDigitalElectronicControl) [1] более предпочтительным является применение топливного насоса-дозатора с регулируемым электроприводом.
Такие САУ применяются для управления малоразмерными газотурбинными двигателями (МГТД) и вспомогательными силовыми установками (ВСУ).
При разработке САУ МГТД и ВСУ необходимо решать вопрос об определении рациональной мощности электропривода и производительности насоса, необходимых для обеспечения благоприятного сочетания собственных свойств электропривода, топливного насоса и объекта управления — МГТД (ВСУ). В данной работе показаны результаты экспериментальных исследований, направленных на поиск алгоритмов решения этой задачи.
Целями работы являлись:
– исследование влияния основных параметров элементов САУ на характеристики системы;
– отработка алгоритмов управления МГТД системой автоматического управления с электроприводным насосом — дозатором;
– формирование требований на разработку системы управления и ее агрегатов.
Основная часть
Исследования проводились на экспериментальной установке, состоящей из МГТД, экспериментальной САУ и системы регистрации параметров. В качестве МГТД первоначально использовался турбостартёр, а впоследствии — малоразмерный турбореактивный двигатель. В состав САУ входили: бесколлекторный электродвигатель, шестерённый насос, силовой контроллер управления, цифровой регулятор и датчики различного назначения.
Регистрация параметров САУ выполнялась цифровой системой регистрации и записи на основе 8-канального аналогово-цифрового преобразователя (АЦП) и ноутбука. Измерялись следующие параметры: расход топлива, давление топлива перед форсунками, давление воздуха за компрессором, температура газов за турбиной, частота вращения ротора двигателя и насоса-дозатора, электрическая мощность электродвигателя насоса-дозатора с необходимой точностью измерений.
Перед испытаниями САУ были экспериментально определены собственные свойства электромотора привода насоса — дозатора на стационарных и переходных режимах.
Испытания экспериментальной САУ проводились в несколько этапов.
На первом этапе исследовалась работа экспериментальной САУ МГТД с однокаскадными форсунками при высоких оборотах насоса-дозатора, на которых собственные свойства его электропривода были более благоприятны, чем на малых оборотах. Однако высокие обороты насоса-дозатора являлись причиной рассогласования между располагаемой производительностью насоса-дозатора и потребным расхода топлива на режиме работы МГТД, которое было устранено применением перепускного клапана, перепускающего топливо с выхода на вход топливного насоса (рис. 1).
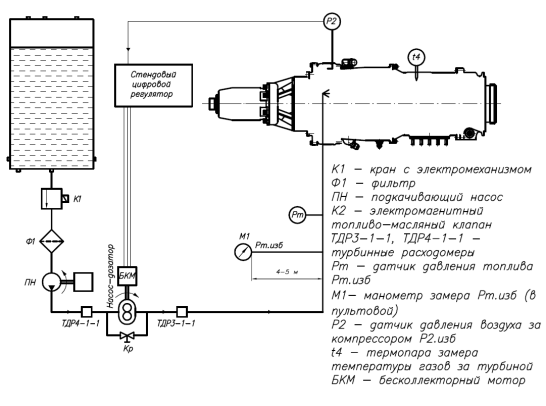
Рис. 1 Схема системы управления МГТД с насосом-дозатором и перепускным клапаном
Раскрутка ротора МГТД на запуске осуществлялась стендовой системой запуска с помощью встроенного электростартера. Дозирование топлива насосом-дозатором на запуске выполнялось автоматически стендовым цифровым регулятором по давлению воздуха (Р2) за компрессором МГТД. При этом цифровой регулятор моделировал предварительно экспериментально снятую характеристику штатного гидромеханического регулятора МГТД.
После запуска двигателя и выхода на режим «малого газа» (МГ) управление МГТД осуществлялось вручную путём подачи на вход цифрового регулятора сигнала, пропорционального заданному значению регулируемого параметра при помощи потенциометра.
На втором этапе выполнялись исследования САУ без перепуска топлива на вход в насос-дозатор (рис. 2).
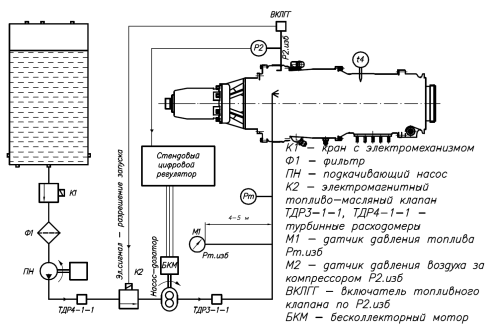
Рис. 2. Схема системы управления МГТД с насосом-дозатором без перепуска топлива
Главной особенностью данного этапа было то, что бесколлекторный электродвигатель насоса-дозатора на начальном этапе разгона ротора МГТД работает вблизи минимальной частоты устойчивого и управляемого вращения.
В программу управления режимами работы насоса-дозатора были добавлены ограничения темпов увеличения и сброса оборотов ротора МГТД.
При исключении перепуска топлива, потребная производительность насоса-дозатора уменьшилась более чем в 2 раза. Во столько же раз сократился и рабочий диапазон частот вращения электродвигателя насоса-дозатора, что затруднило точное регулирование.
На первом и втором этапе управляемым параметром МГТД являлось давление воздуха в камере сгорания.
На третьем этапе проводились стендовые испытания экспериментальной САУ с МГТД оснащённым двухкаскадными форсунками. Управляемым параметром являлась частота вращения ротора МГТД.
Для выполнения этих испытаний по сравнению с предыдущими этапами в испытательную установку и в программу управления двигателем внесены следующие изменения:
– изменен объект управления;
– в систему подачи топлива установлен распределительный клапан включения второго каскада форсунок по давлению;
– в САУ добавлен сигнал частоты вращения ротора МГТД;
– в САУ добавлен сигнал температуры газов за турбиной;
– в алгоритме цифрового управления смоделированы следующие контуры управления:
Qт.бросок — программный контур формирования подачи топлива на запуске двигателя;
Qт=f(n)static — замкнутый контур дозирования топлива на установившихся режимах;
(Qт/P2.абс)up — замкнутый контур дозирования топлива для быстрого увеличения оборотов МГТД (приёмистости);
(Qт/P2.абс)down — замкнутый контур дозирования топлива для быстрого уменьшения оборотов ротора МГТД (сброса оборотов);
P2max — контур ограничения избыточного давления воздуха за компрессором;
P2min — контур ограничения минимального значения избыточного давления воздуха за компрессором;
P2minmin — пробное значение дополнительного ограничителя минимального режима работы двигателя;
При формировании алгоритма работы контура дозирования топлива на установившихся режимах использована экспериментально снятая зависимость потребного расхода топлива от частоты вращения ротора МГТД со штатной САУ.
В ходе данных испытаний была выполнена проверка работы САУ в полностью автоматическом режиме по запрограммированной в цифровом регуляторе циклограмме управления режимами работы МГТД с плавным и быстрым увеличением оборотов ротора МГТД, ступенчатым увеличением оборотов ротора МГТД, плавным и быстрым уменьшением оборотов ротора МГТД.
Кроме того, при данном исследовании опробовано увеличение количества топлива при запуске двигателя с целью снижения времени запуска, выполнена проверка запуска двигателя с выходом на максимальный режим работы без прогрева, выполнена проверка формирования подачи топлива и восстановление режима работы двигателя при погасании камеры сгорания во время работы.
На рис. 3 представлена работа САУ в автоматическом режиме по циклограмме управления режимами работы МГТД со стороны бортовой системы летательного аппарата.
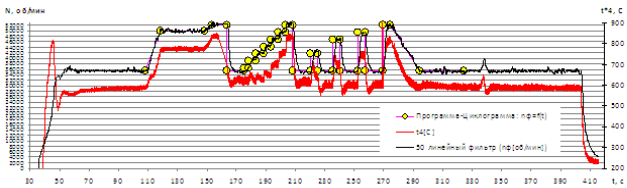
Рис. 3. Автоматический режим работы САУ
В результате проведенных работ получены следующие результаты:
– экспериментальная цифровая САУ обеспечила удовлетворительную управляемость ГТД на всех стационарных и переходных режимах, в том числе и при работе бесколлекторного электродвигателя вблизи минимальной границы его устойчивой работы (без перепуска топлива);
– использование распределительного клапана в экспериментальной цифровой САУ с электроприводным топливным насосом-дозатором при управлении МГТД с двухкаскадными форсунками не оказывало заметного влияния на качество процесса регулирования.
Заключительная часть
В результате проведенных работ можно сделать следующие выводы:
- Характеристики динамичности и точности электроприводного насоса-дозатора с бесколлекторным электродвигателем и шестеренным насосом достаточны для устойчивого и точного регулирования МГТД в стендовых условиях.
- САУ позволяет реализовать алгоритмы управления основными фазами режимов работы МГТД: запуск (раскрутка ротора, розжиг камеры сгорания, увеличение оборотов ротора, стабилизация оборотов ротора, останов двигателя и встречный запуск) и всережимное управление МГТД без ограничений на темп и характер изменения управляющего сигнала со стороны оператора (или САУ летательного аппарата).
- По результатам проведенных работ может быть составлены требования для разработки САУ малоразмерного МГТД.
- На следующем этапе рекомендуется перейти к разработке средств и алгоритмов обеспечения отказоустойчивости и надежности электронной САУ с электроприводными агрегатами.
Литература:
- Справочная информация. [Электронный ресурс]: http://avia.pro/blog/razrabotka-gtd. HTM, свободный, 28.04.2014.
- Работы ведущих авиадвигателестроительных компаний в обеспечение создания перспективных авиационных двигателей. ЦИАМ, 2010г.
- Иностранные авиационные двигатели. ЦИАМ, 2010г.
