




В статье представлено краткое описание мультиагентной системы управления. Рассмотрена возможность применения роевых алгоритмов для моделирования коллективного интеллекта в системах управления в FANET.
Ключевые слова: роевой интеллект, БПЛА, FANET, мультиагентная система управления, коллективный интеллект
На протяжении последнего десятилетия в России большую актуальность приобретают так называемые летающие сети, представляющие особый вид одноранговой самоорганизующейся сети на основе беспилотных летательных аппаратов (БПЛА) [1]. БПЛА призваны решать широкий спектр задач гражданского применения. Возможность использования БПЛА в качестве основы создания сетевой инфраструктуры рассматривается как привлекательный подход для эффективного увеличения коммуникационных возможностей сетей. Основными преимуществами использования БПЛА являются универсальность, гибкость, относительно небольшие эксплуатационные расходы и исключение человеческого фактора при выполнении поставленной задачи [2]. Анализ задач, выполняемых с помощью систем, состоящих из одиночных БПЛА, позволяет сделать вывод о том, что применение систем мульти-БПЛА является наиболее эффективным подходом [3].
В научной литературе, встречается несколько определений самоорганизующихся сетей мульти-БПЛА с разными названиями, по-своему объясняющими новую сетевую модель (см. таблица 1) [4].
Таблица 1
Названия моделей высокомобильных сетей БПЛА
|
Название сети |
Источник |
|
Airborne Networks (Airborne Telemetry Networks, Airborne Communication Networks, Airborne Backbone Networks, etc.) |
[5] |
|
Unmanned Aeronautical Ad-hoc Networks (UAANETs) |
[6] |
|
UAV Ad Hoc Networks |
[7] |
|
Networks of UAVs |
[8] |
|
Distributed Aerial Sensor Networks |
[9] |
|
Flying Ad Hoc Networks (FANET) |
[10] |
Несмотря на то, что используемые названия имеют незначительные различия в определениях, очевидно, что данная модель представляет собой особую форму VANET (Vehicular Ad Hoc Network). Поэтому целесообразно использовать название FANET для новой сетевой модели.
Новое поколение легких и малых БПЛА позволяет разрабатывать воздушные робототехнические системы широкого спектра применения. На рис. 1 представлено схематическое изображение проекта ANCHORS (UAV — Assisted Ad Hoc Networks for Crisis Management and Hostile Environment Sensing) по применению технологии одноранговых сетей БПЛА для управления в аварийных ситуациях и дистанционного сканирования зоны заражения. Целью проекта является организация автономной сети состоящей из различных беспилотных систем, которые могут быть использованы в качестве независимой коммуникационной инфраструктуры для аварийных служб при возникновении чрезвычайной ситуации [11].
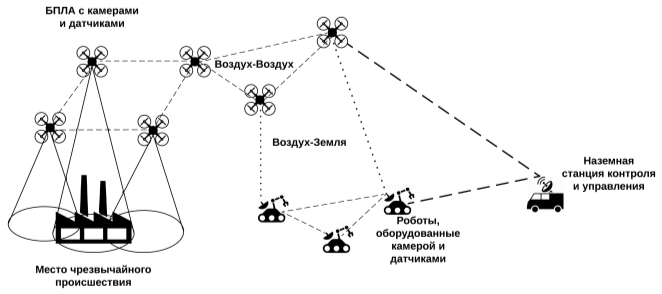
Рис. 1. Схема проекта ANCHORS.
Применение малоразмерных БПЛА накладывает следующие ограничения [12]:
‒ габариты: малые размеры аппарата ограничивают набор доступных бортовых сенсорных устройств;
‒ энергозатраты: ограниченный энергоресурс приводит к уменьшению радиуса работы активных средств сбора данных, таких как лазерные дальномеры, ультразвуковые датчики и т. п.;
‒ радиус действия: одиночный малоразмерный БПЛА может самостоятельно собрать информацию на относительно небольшом расстоянии;
‒ препятствия для полета: по-прежнему актуальным останется поиск и своевременное обнаружение препятствий, в качестве которых могут выступать здания, деревья, линии электропередач и т. д.;
‒ устойчивость полета: малые БПЛА в большей степени подвержены неустойчивым потокам естественной турбулентности атмосферы, особенно в условиях плотной городской застройки.
Большое внимание среди исследователей и ученых уделяется поиску решения задачи управления и распределённого взаимодействия в сетях с динамически изменяющейся топологией, таких как FANET.
Характерной особенностью мультиагентных технологий является их способность к коллективному поведению, с целью решения общей задачи.
Коллективом называют группу агентов, например, БПЛА, решающих одну общую целевую задачу и взаимодействующих между собой для решения этой задачи. При этом коллективное взаимодействие охватывает большое число агентов системы и проявляется в их согласованных действиях.
Метод коллективного управления заключается в том, что каждый БПЛА самостоятельно управляет процессом своего функционирования, т. е. определяет свои действия, а также согласовывает эти действия с другими агентами группы для наиболее эффективного, т. е. с минимальными затратами и максимальной выгодой для группы, решения целевой задачи [13].
Основными принципами коллективного управления являются [14]:
каждый член коллектива группы самостоятельно формирует свое управление (определяет свои действия) в текущей ситуации;
выбор действий каждым членом коллектива осуществляется только на основе информации о коллективной цели, стоящей перед группой, ситуации в среде в предыдущей отрезок времени и в текущий момент, своего текущего состояния и текущих действий других членов коллектива;
в качестве оптимального действия каждого члена коллектива в текущей ситуации понимается такое, которое вносит максимально возможное приращение целевого функционала при переходе системы «коллектив-среда» из текущего состояния в конечное;
оптимальное управление реализуется членами коллектива в течение ближайшего отрезка времени в будущем, а затем определяется новое действие;
допускается принятие компромиссных решений, удовлетворяющих всех членов коллектива, то есть каждый член коллектива может отказаться от действий, приносящих ему максимальную выгоду, если эти действия приносят малую выгоду или даже ущерб коллективу в целом.
Метод коллективного управления является эффективным при использовании в распределенных мультиагентных системах. К основным преимуществам относится низкая вычислительная сложность алгоритмов, что позволяет за короткие промежутки времени принимать оптимальные или близкие к ним решения в условиях динамически изменяющейся ситуации.
В качестве перспективного решения рассматриваются методы роевого интеллекта (Swarm intelligence), базирующиеся на моделировании коллективного интеллекта [15]. Роевой интеллект описывает коллективное поведение децентрализованной самоорганизующейся системы, природного или искусственного происхождения. Наиболее известными роевыми алгоритмами являются [16]:
‒ алгоритм муравьиной колонии;
‒ пчелиный алгоритм;
‒ алгоритм роя частиц.
Общая схема работы роевых алгоритмов основана на выполнении следующих этапов [17]:
- В области поиска создаётся некоторое число начальных приближений к искомому решению задачи — инициализируется популяция агентов.
- С помощью набора миграционных операторов (специфической тактики для каждого из роевых алгоритмов) агенты перемещаются в области поиска таким образом, чтобы в конечном счёте приблизиться к искомому экстремуму целевой функции.
- Выполняется проверка условия окончания итераций. Если это условие выполнено, то вычисления завершаются. При этом в качестве приближенного решения принимается лучшее из найденных положений агентов. Если условие не выполнено — выполняется возврат к этапу 2.
Колония представляет собой систему с очень простыми правилами автономного поведения особей. Однако, несмотря на примитивность поведения каждого отдельного агента, поведение всей колонии оказывается достаточно разумным. Таким образом, основой поведения колонии служит низкоуровневое взаимодействие, благодаря которому колония в целом представляет собой разумную многоагентную систему [18].
Подводя итог, можно отметить, что использование систем мульти-БПЛА, прежде всего на основе малоразмерных моделей, способных принимать решения самостоятельно без вмешательства человека, является перспективным направлением дальнейших исследований. В статье рассмотрены основные проблемы, стоящие на пути развития и создания таких систем. Основной акцент сделан на вопросы касающиеся управления и обеспечения связи в группе. Применение мультиагентной адаптивной системы для управления группой БПЛА позволяет снизить стоимость разработки и дальнейшей эксплуатации системы мульти-БПЛА. Для организации взаимодействия внутри группы БПЛА предложено использовать роевые алгоритмы.
Литература:
- Трубников Г. В. Применение беспилотных летательных аппаратов в гражданских целях [Электронный ресурс]. URL: http://www.uav.ru/articles/civil_uav_th.pdf (дата обращения 15.03.16)
- Амелин К. С. Адаптивное управление автономной группой беспилотных летательных аппаратов / Амелин К. С., Антал Е. И., Васильев В. И., Граничина Н. О. // Издательство Санкт-Петербургского государственного университета. — 2009. Т. 5, № 1–1. С. 157–166.
- Bekmezci İ., Sahingoz O. K., Temel Ş. Flying Ad-Hoc Networks (FANETs): A survey // Ad Hoc Netw. 2013. Vol. 11, № 3. P. 1254–1270.
- Sahingoz O. K. Mobile networking with UAVs: opportunities and challenges // Unmanned Aircraft Systems (ICUAS), 2013 International Conference on. IEEE, 2013. P. 933–941.
- Cheng B.-N., Moore S. A comparison of MANET routing protocols on airborne tactical networks // Military communications conference, 2012-MILCOM 2012. IEEE, 2012. P. 1–6.
- R. Shirani et al. Combined Reactive- Geographic routing for Unmanned Aeronautical Ad-hoc Networks. 2012. P. 820–826.
- Cai Y. et al. Medium Access Control for Unmanned Aerial Vehicle (UAV) Ad-Hoc Networks With Full-Duplex Radios and Multipacket Reception Capability // IEEE Trans. Veh. Technol. 2013. Vol. 62, № 1. P. 390–394.
- Bök P.-B., Tüchelmann Y. Context-aware qos control for wireless mesh networks of uavs // Computer Communications and Networks (ICCCN), 2011 Proceedings of 20th International Conference on. IEEE, 2011. P. 1–6.
- Rohde S. et al. Link quality dependent mobility strategies for distributed aerial sensor networks // GLOBECOM Workshops (GC Wkshps), 2010 IEEE. IEEE, 2010. P. 1783–1787.
- Sahingoz O. K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges // J. Intell. Robot. Syst. 2014. Vol. 74, № 1–2. P. 513–527.
- ANCHORS project [Электронныйресурс]. URL: http://anchors-project.org/index.php/en/home/14-das-projekt-im-ueberblick/7-project-overview.html (датаобращения: 02.04.2016).
- Иванов Д. Я. Методы роевого интеллекта для управления группами малоразмерных беспилотных летательных аппаратов // Известия ЮФУ. Технические науки. — 2011. Т. 3, № 116. С. 221–229.
- Амелина Н. О. Мультиагентные технологии, адаптация, самоорганизация, достижение консенсуса // Стохастическая оптимизация в информатике. — 2011. Т. 7, № 1–1. С. 149–185.
- Каляев И. А., Мельник Э. В. Децентрализованные системы компьютерного управления. — Ростов на Дону: ЮНЦ РАН. 2011. 196 с.
- Engelbrecht A. P. Fundamentals of Computational Swarm Intelligence. John Wiley & Sons, Chichester, UK, 2005.
- Blum C., Roli A. Metaheuristics in combinatorial optimization: Overview and conceptual comparison // ACM Comput. Surv. CSUR. 2003. Т. 35, № 3. С. 268–308.
- Мохов В. А., Бородулина Е. Н. К вопросу о параметрической оптимизации роевых алгоритмов // Известия Южного Федерального Университета Технические Науки. — 2014. Т. 4, № 153. С. 230–234.
- Курейчик В. М., Кажаров А. А. О некоторых модификациях муравьиного алгоритма // Известия ЮФУ. Технические науки. — 2008. № 4 (81). С. 7–12.
