




In the modern world raises the question of robotics prevent fire in the initial stage. It is therefore proposed to develop a robot with the aforesaid optical system, allowing to quickly detect fire and fully localize it.
Keywords: The robot, forest fires, the optical system
При лестных пожарах выгорают леса и погибают звери. Это влечет за собой различные экологические последствия. Представляем робота, который сможет справиться с пожаром и предотвратить его появление (рис.1.)

Рис. 1. Робот, имитирующий насекомое
Этот робот способен перемещаться с помощью конечностей. Если местность требует соответствующего сложного передвижения. Поэтому робот снабжается шестью парами лап похожими на лапы насекомого. В передней части робота устанавливаются пара усиков-датчиков, которые помогают роботу ориентироваться в пространстве, не натыкаться на препятствия. Многочисленные конечности нужны чтобы беспрепятственно перемещаться и патрулировать территорию. Главная его задача предотвращение пожара. У робота имеются инфракрасные сенсоры, с помощью которых он реагирует на сильные источники тепла. Когда такой источник попадает в поле реагирования, он связывается по беспроводной связи в координационный центр.
Скорость, с которой передвигается робот, зависит от типа местности.
С помощью оптической системы робот сможет различать пространство предметов — область, в которой расположены объекты, и пространство изображений — область, в которой размещается изображение. Важнейшим элементом оптической системы является линза. В зависимости от комбинации образующих линзу поверхностей (выпуклой, вогнутой и плоской) различают более 10 типов линз. Наиболее распространенные типы линз имеют сферические сопрягаемые поверхности. Важнейшим параметром линзы является ее фокусное расстояние. В общем случае линза содержит две поверхности раздела сред, поэтому она имеет два фокуса: передний fп (со стороны пространства изображений). Соответственно и фокусных расстояний в такой линзе два: переднее и заднее. В такой линзе выделяют две главные точки (переднюю Н и заднюю Н`) а также переднюю N и заднюю N` узловые точки. В простых расчетах ограничиваются моделью такой линзы, для которой переднее и заднее фокусные расстояния принимают одинаковыми и равными расстоянию вдоль оптической оси от центра линзы до ее фокальной точки.
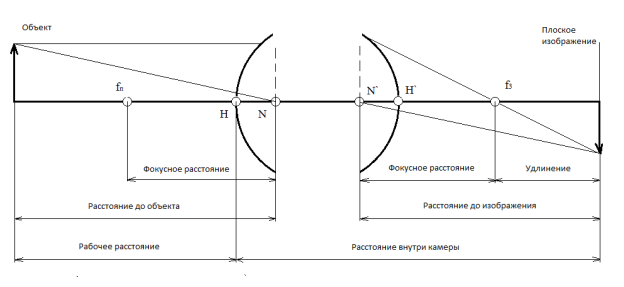
Рис. 2. Основные оптические точки линзы
Оптическаясила FDсферической поверхности зависит от радиуса кривизны границы раздела двух сред с показателями преломления n1 и n2 и связана с передними и задним фокусными расстояниями выражением
 (1)
(1)
Оптическую силу линзы измеряют в метрах в минус первой степени (м-1)
Для тонкой линзы, находящейся в воздухе (![]() ), справедливая приближенная зависимость
), справедливая приближенная зависимость
У собирающих линз ![]() , у рассеивающих
, у рассеивающих ![]() . Чем больше оптическая сила, тем ближе к линзе располагается изображение и тем оно меньше.
. Чем больше оптическая сила, тем ближе к линзе располагается изображение и тем оно меньше.
Оптическую силу системы с несколькими линзами вычисляют по формуле Гульстранда, учитывающей количество преломляющих поверхностей. Так, если оптическая система состоит из нескольких линз, то для каждой из них справедливо
 (2)
(2)
Здесь ![]() и
и ![]() — оптические силы передней и задней поверхностей линзы соответственно;
— оптические силы передней и задней поверхностей линзы соответственно; ![]() - расстояние между ними;
- расстояние между ними; ![]() — показатель преломления заключенной между ними среды.
— показатель преломления заключенной между ними среды.
Главными характеристиками оптической системы являются: масштаб изображения, светосила поле зрения и разрешающая способность.
Обычно яркость предмета принимают постоянной. Тогда освещенность изображения Ȝu и будет являться параметром, определяющим светосилу оптической системы. Яркость изображения Y связана с яркостью предмета Yп соотношением:
где ![]() — коэффициент пропускания света.
— коэффициент пропускания света.
Разрешающая способность связана со свойством оптической системы получать контрастное изображение, т. е. воспроизводить раздельно две точки. Её также можно определить в угловых и линейных единицах. Угловую решающую способность ѱp вычисляют по формуле Рэлея:
 (3)
(3)
где ![]() — диаметр входного зрачка.
— диаметр входного зрачка.
Линейную разрешающую способность Кр определяют с помощью тест-объектов, называемых мирами. В роботе разрешающая способность Кр оптических систем достигает 100 линий на 1 мм. Разрешающая способность глаза зависит от диаметра его зрачка (1,5 … 8 мм) и растет с увеличением последнего. Она максимальна при оснащенности Ȝ около 50 лк и длины излучения ![]() мкм.
мкм.
Работоспособность применяемой оптической системы позволяет сделать вывод, использование её как техническое зрение демонстрирует положительные качества, присущие роботам 3-го поколения.
Литература:
- Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес. Теоретические основы робототехники; Книга 1; изд-во Наука, 2006.
- http://www.membrana.ru/particle/3220
