




Создание вращающего момента вентильного электродвигателя
Основными исполнительными устройствами в электромеханической системе наиболее универсальными управляемыми свойствами и эксплуатационными показателями обладают бесконтактные двигатели постоянного тока (БДПТ). Бесконтактный двигатель постоянного тока — это электрическая машина постоянного тока, в которой механический коллектор заменен полупроводниковым коммутатором (ПК), поэтому его также называют вентильный электродвигатель. Первые серии которых были созданы в пятидесятых годах двадцатого века посредством замены щеточно-коллекторного узла двигателя постоянного тока на более надежный полупроводниковый коммутатор. Бесконтактные двигатели постоянного тока работают в условиях вакуума и агрессивных сред, экономичны и более быстроходны, чем двигатели щеточного типа, весьма гибки в управлении, а срок их службы практически ограничен износом подшипникового узла. Большой вклад в теорию и практику создания и совершенствования бесконтактных двигателей постоянного тока, а также управления ими внесли инженеры и ученые И. Е. Овчинников, Н. И. Лебедев, Ш. И. Лутидзе, A. A. Дубенский, В. К. Лозенко, A. M. Бертинов, В. А. Балагуров, Д. А. Бут, М. Г. Чиликин.
На сегодняшний день разработка и исследование электромеханических систем с бесконтактными двигателями постоянного тока в качестве объекта управления преобладает все большее значение, что характерно существующими преимуществами по сроку службы, особенностью работы в суровых условиях эксплуатации, универсальностью регулировочных качеств, а также достаточной легкостью в управлении. Разнообразие имеющих и разрабатываемых бесконтактных двигателей способствовала за собой появление огромного числа разных схем управления этими двигателями.
Необходимо отметить, что основное внимание исследователей сосредоточено на решении основных вопросов по построения отдельных узлов бесконтактных двигателей постоянного тока и их конструктивного усовершенствования. Условно меньшее количество работ посвящено аспектом по проектированию совершенно новых универсальных алгоритмов и средств управления электромеханическими системами с применением бесконтактных двигателей постоянного тока, направленных на улучшение их энергетических показателей.
В этой связи в области управления электромеханическими системами с бесконтактными двигателями постоянного тока возникает ряд вопросов и связанных с ними проблем теоретического и прикладного характера, для решения которых необходимо проведение соответствующих исследований.
Таким образом, проблема создания новых высоконадежных электромеханическими системами с бесконтактными двигателями постоянного тока, работающих по ряду параметров оптимально, а также разработки соответствующих алгоритмов и средств улучшения качество функционирующих процессов и динамических характеристик, реализующих принцип энергосберегающих технологий, является актуальной.
Данный электродвигатель в конструктивно полностью соответствует синхронному электродвигателю, возбуждение которого осуществляется от постоянных магнитов, размещенных на роторе. Однако питание фаз статорных обмоток вентильного двигателя осуществляется не от сети переменного тока, а постоянным током через полупроводниковый коммутатор (ПК) (рис 1.). Полупроводниковый коммутатор по сигналам логического устройства (ЛУ) поочередно, и в определенной порядочности, попарно запутывает фазы статорных обмоток электродвигателя, создавая вращающееся поле статора, которое, взаимодействуя с полем постоянных магнитов (МП) ротора, создает вращающий момент ЭД: Мд=КФIя, где Ф — поток постоянного магнита, расположенного на роторе, Iя — ток статорных обмоток (ток якоря), К — постоянный для данного ЭД коэффициент.
Материал магнита — на основе редкоземельных элементов (РЗМ) — самария и кобальта или на основе магнитных материалов. Магниты на основе редкоземельных материалов обладают большими магнитными силами, и не подвержены размагничиванию магнитными полями, создаваемыми токами статорных обмоток при статических или динамических перегрузках электродвигателя.
Переключение фаз статора должно производиться при определенных, согласованных с ними, положениях ротора. Поэтому на валу ЭД обычно располагается датчик положения ротора (ДПР), формирующий сигналы DA, DB, DC, которые используются логическое устройства (ЛУ) для формирования команд управления полупроводниковым коммутатором (ПК).
Отличие вентильного двигателя от синхронного электродвигателя состоит в том, что частота поля статора в нем изменяема, а определяется частотой вращения ротора частотой сигналов датчика положения ротора, используемых для управления полупроводниковым коммутатором, определяется частотой вращения ротора. Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора. Тем самым, поле статора вынужденно по сигналам датчика положение ротора одновременно вращается с ротором, что дает возможность в теоретическом плане для изучения вентильного двигателя использовать теорию двух реакций, при исследовании синхронных электродвигателей обычной конструкции. В то же время происходящие действия и механическая характеристика вентильного двигателя такие же, как у обычных коллекторно-щеточных двигателей постоянного тока, следовая этому средние за период параметры вентильных двигателей могут быть достаточно точно охарактеризовать их уравнениями.
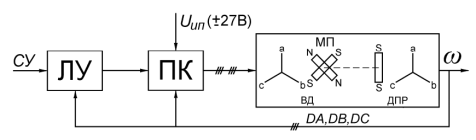
Рис. 1. Функциональная схема вентильного электродвигателя
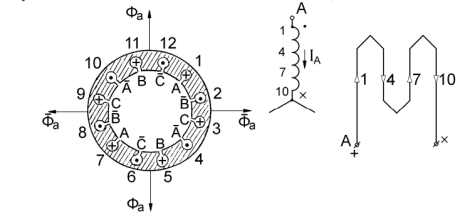
Рис. 2. Схема размещения обмотки и магнитных потоков фазы А (Фа)
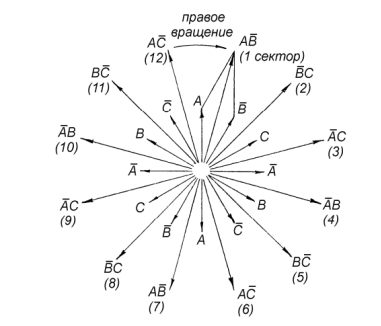
Рис. 3. Векторная диаграмма магнитного поля
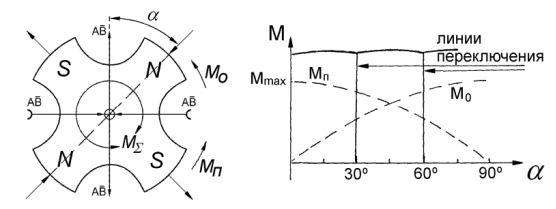
Рис. 4. Моментные характеристики бесконтактного двигателя постоянного тока
Массовое и энергетические характеристики вентильного двигателя при использовании современных мощных магнитов высокой энергии превышают показатели коллекторных двигателей постоянного тока, особенно при создании следящих электроприводов, регулируемых от внешних сигналов управления (СУ) различных самолетных систем (систем управления рулями, рукоятками управления и др.).
При этом вентильный двигатель не имеет недостатков от обычных двигателей постоянного тока, связанных с применением у них щеточно-коллекторного узла:
- искрение щеток, что ограничивает высотность электродвигателя;
- наличие якорной обмотки не позволяет уменьшить диаметр якоря, а так как момент инерции пропорционален квадрату диаметра якоря, то быстродействие привода невысоко;
- при больших скоростях возможен обрыв якорной обмотки;
- размещение якорной обмотки на роторе ухудшает отвод тепла.
Обратим внимание на процесс образования вращающего момента винтельнлго двигателя на примере 4-х полюсного электродвигателя, статор которого содержит z=12 пазов, в которых размещена трёхфазная обмотка (m1=3) c числом пазов на полюс и фазу q=1, т. е:2=2p•q•m=4•1•3=12 (см. Рис. 2).
Каждая из обмоток намотана таким образом, чтобы втекающий в нее ток создавал по правилу буравчика четыре магнитных потока, расположенных под углом 90° друг к другу (Рис. 2.а).
Обозначение индексов A, B, C внутри каждого сектора на (рис. 2) означают, что ток в соответствующей фазе направлен от нас. Индексы А, В, С означают, что ток в соответствующей фазе течет к нам. Аналогично можно построить векторы магнитных потоков для фазы В и фазы С и совместить их на одном рисунке (рис. 3).
При работе каждая фаза создает четыре вектора, то при m=3 число таких векторов равно 12, они в пространстве по окружности статора смещены на 360°/12=30° геометрических градусов. Если порядок обхода векторов соответствует цифровому обозначению 30-ти градусных секторов (1…12), в этом случае будет соответствовать вращению поля статора и ротора по часовой стрелке (правое движение). Для удобства исследование стрелки всех векторов на (рис. 3) направлены к периферии, поэтому у векторов, у которых изменено направление стрелки, в обозначении введены отрицания.
На (рис. 3) произведено геометрическое сложение соседних векторов: так сложение векторов А и В дает вектор АВ, С и В — вектор СВ и т. д.
Заметим, что такое сложение векторов соответствует физическому процессу включения фаз: одновременно всегда включены только какие-либо 2 фазы, но в одну ток втекает (здесь А), а через другую вытекает (фазы В или С).
Заметим также, что при поочередном обходе векторов каждая фаза работает на интервале двух секторов (у рассмотренных векторов АВ и СВ фаза В с вытекающим током работает в секторах 1 и 2).
Рассматривая диаграмму (рис. 3) совместно с магнитными потоками, создаваемыми постоянным магнитом (рис. 4), можно увидеть что при каждом включении очередной пары фаз (рис. 4) А и В они при взаимодействии с постоянными магнитами создают четыре притягивающих (при разной полярности) и четыре отталкивающих (при одноименных полюсах) момента (Мп и М0): Мп=Mmax•Sina, M0=Mmax•cosa, и суммарный момент на валу электродвигателя составит: Me=4Mmax•(sina+cosa), где a — угол взаимного расположения полей магнита и якоря.
На основании векторной диаграммы магнитного поля (рис. 3) и его моментных характеристик можно сделать дополнительно следующие выводы:
- Магнитное поле, образованное силовым магнитом и магнитное поле, образованное статорными обмотками, представляют собой фигуры в виде двух вращающихся крестов: первый вращается плавно, второй — скачками, через 30° геометрических. Наибольший взаимодействующий момент возникает тогда, когда угол между «крестами» будет составлять 45°. Таким образом, коммутация должна производиться при углах рассогласования «крестов» 30°-60°.
- Для осуществления реверса в двигательном режиме магнитный поток и ток обмоток якоря следует повернуть в обратную сторону, т. е. в алгоритме программы управления знак индекса ключа изменить на противоположный (АВ на АВ, ВС на ВС и т. д.). В режиме динамического торможения алгоритм программы для правого и левого направлений вращения неизменен.
- Моменты коммутации ключей силового моста при рассогласовании магнитных потоков, создаваемых с помощью обмоток статора и силовым магнитом (30° и 60°), должны определяться с помощью датчика положения ротора.
Литература:
- Баранов В. К. Формирователь угла опережения фазы для бесконтактного двигателя постоянного тока // Электронная техника в автоматике, Вып. 16: Сб. статей. — М.: Радио и связь, 1985. — С. 226.
- Букатова В. Е., Винокуров С. А., Ильина Н. Е. Разделение каналов реверса и управления в бесконтактных двигателях постоянного тока // Современные проблемы информатизации: Тез. докл. 2 республиканской электронной науч. конф — Воронеж, 1997. — С. 126.
- Бут Д. А. Бесконтактные электрические машины: Учебное пособие. — М.: Высшая школа, 1990. — 416 с.
- Вентильные электродвигатели малой мощности для промышленных роботов / Под ред. В. Д. Косулина. — Л., 1988. — 146 с.
- Двигатели постоянного тока с полупроводниковыми коммутаторами. — Л.: Наука, 1972. — 170 с.
