




В процессе проектирования, доводки, отладки авиационных газотурбинных двигателей при помощи имитационных моделей (например, в системе DVIGwp [2] или DVIG_OTLADKA [3], разработанных на кафедре авиационных двигателей УГАТУ) возникает необходимость получения индивидуальной модели каждого конкретного двигателя.
В системе DVIG_OTLADKA модель двигателя представляет собой взаимосвязанный набор структурных элементов (СЭ) двигателя (входное устройство, КНД, КВД, ОКС и т.д.). Для каждого из типов двигателя может быть создана своя топологическая модель со своим набором СЭ [2]. Топологическая модель ТРДДФсм совместно с модулем автоматики представлена на рисунке 1. Чтобы получения индивидуальную имитационную модель (ИМ) данного двигателя на одном из режимов необходимо знать (и получить в модели) параметры на входе и выходе из каждого СЭ на этом режиме. Чтобы получить ИМ двигателя на другом режиме, необходимо настроить характеристики СЭ модели (компрессоров, турбин, камеры сгорания и т.д.) таким образом, чтобы параметры на входе и выходе из каждого элемента совпадали с аналогичными параметрами двигателя на том же режиме. Чтобы получить ИМ двигателя на неустановившихся режимах работы, необходимо знать динамические поправки (инерционность роторов и др.) и свойства автоматики (инерционность подачи топлива в ОКС, ФКС, инерционность створок РС, инерционность срабатывания автоматики, инерционность датчиков и т.д.).
При испытаниях двигателя производится снятие некоторых параметров двигателя на нескольких установившихся режимах, снятие характеристик некоторых узлов и различные переходные процессы (МГ-М, М-ПФ и т.д.). Эти параметры используются для получения индивидуальной модели двигателя. Идентификация математических моделей ГТД по результатам испытаний двигателя проводится с использованием различных методов: метод нелинейной оптимизации; метод наименьших квадратов; метод максимального правдоподобия; метод группового учета аргументов. Используемый в данной работе метод идентификации близок к методу наименьших квадратов. Исходя из данного метода, необходимо выбрать варьируемые параметры, сформировать невязки (составить систему уравнений, условий расчёта) и осуществить процедуру сведения невязок (решить систему уравнений, условий расчёта). За счет уточнения значений коэффициентов, характеризующих элементы газовоздушного тракта, минимизируются невязки между одноименными параметрами, полученными расчетом по математической модели и экспериментальным путем.
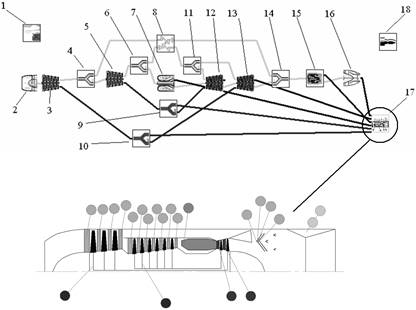
Рис. 1. Топологическая модель ТРДДФсм с элементами автоматики
в системе DVIG_OTLADKA,
где 1 – внешние условия; 2 – входное устройство; 3 – КНД; 4 – отбор газа; 5 – КВД; 6 – отбор газа 2; 7 – камера сгорания; 8 – ВВТ; 9 – отбор мощности; 10 – отбор мощности 2; 11 – отбор газа 2; 12 – ТВД; 13 – ТНД; 14 – смеситель; 15 – ФКС; 16 – РС; 17 – «Регулятор», автоматика двигателя; 18 – общие результаты.
Методика получения индивидуальной модели двигателя
Непосредственно измеренные в процессе испытаний данные (например, на режиме М) передаются в СИМ DVIG_OTLADKA при помощи специально структурированного файла обмена. Все эти данные можно разделить на два вида: входные для СЭ (например, параметры окружающей атмосферы, расход воздуха, частоты вращения роторов, степень повышения давления компрессоров и т.д.) и выходные для СЭ и всей модели двигателя (тяга, удельный расход топлива, температура газов за турбиной низкого давления и т.д.). Входные данные напрямую присваиваются на вход соответствующих СЭ (например, расход воздуха – входное устройство, частота вращения – компрессора и т.д.). Выходные параметры приходится подбирать за счёт изменения других входных для СЭ параметров - варьируемых (КПД компрессоров, коэффициент полноты сгорания ОКС, коэффициент восстановления полного давления ОКС и ФКС) [1].
Схема методики идентификация ИМ двигателя в СИМ DVIG_OTLADKA состоит из четырёх этапов и приведена на рисунке 2.
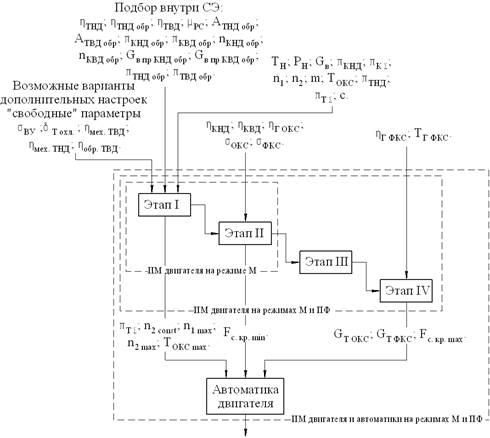
Рис.2. Схема реализации идентификации двигателя и его автоматики
На первом этапе данные с испытаний на режиме М передаются на вход СЭ ( ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  – по удельному расходу топлива) в модель двигателя, настроенного на среднестатистические параметры двигателя (рисунок 1). При этом должны выполняться условия моделирования, приведённые в таблице 1. В них варьируемые параметры подбираются таким образом, чтобы поддерживаемые параметры всегда были равны 1. Поддерживаемые параметры – специально введённые параметры, равные отношению самой выходной величине, к величине, пришедшей из файла обмена. Точность расчёта каждого поддерживаемого параметра устанавливается отдельно в условиях расчёта.
– по удельному расходу топлива) в модель двигателя, настроенного на среднестатистические параметры двигателя (рисунок 1). При этом должны выполняться условия моделирования, приведённые в таблице 1. В них варьируемые параметры подбираются таким образом, чтобы поддерживаемые параметры всегда были равны 1. Поддерживаемые параметры – специально введённые параметры, равные отношению самой выходной величине, к величине, пришедшей из файла обмена. Точность расчёта каждого поддерживаемого параметра устанавливается отдельно в условиях расчёта.
Кроме перечисленных в таблице 1, внутри СЭ выполняются алгоритмы подбора следующих величин:  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  . При этом внутри СЭ поддерживаются:
. При этом внутри СЭ поддерживаются:  ;
;  ;
;  . В случае превышения (или занижения) варьируемыми величинами определённых значений (установленных для каждого СЭ), система выдаёт сообщение об ошибке. Дальнейшую идентификацию следует проводить при других (варьируемых) значениях следующих величин:
. В случае превышения (или занижения) варьируемыми величинами определённых значений (установленных для каждого СЭ), система выдаёт сообщение об ошибке. Дальнейшую идентификацию следует проводить при других (варьируемых) значениях следующих величин:  ;
;  ;
;  ;
;  ;
;  (так как они не входят в число параметров, которые подбираются автоматически в ходе идентификации, они названы «свободными»). Значения всех варьируемых параметров записывается в специальный файл, из которого эти значения присваиваются на вход соответствующих СЭ на втором этапе. Второй этап рассчитывается без условия расчёта. Он необходим для того, чтобы соответствующие СЭ получили подобранные на этапе I варьируемые данные. После успешного окончания второго этапа – получаем индивидуальную ИМ двигателя на режиме М [3].
(так как они не входят в число параметров, которые подбираются автоматически в ходе идентификации, они названы «свободными»). Значения всех варьируемых параметров записывается в специальный файл, из которого эти значения присваиваются на вход соответствующих СЭ на втором этапе. Второй этап рассчитывается без условия расчёта. Он необходим для того, чтобы соответствующие СЭ получили подобранные на этапе I варьируемые данные. После успешного окончания второго этапа – получаем индивидуальную ИМ двигателя на режиме М [3].
На третьем этапе должны выполняться условия моделирования, приведённые в таблице 2. Значения всех варьируемых параметров (так же как и в первом этапе) записывается в специальный файл, из которого эти значения присваиваются на вход соответствующих СЭ на четвёртом этапе. После успешного окончания четвёртого этапа – получаем индивидуальную ИМ двигателя на режимах М и ПФ.
|
Таблица 1 Условия идентификации на этапе I
|
Таблица 2 Условия идентификации на этапе III
|
 (ОКС)
(ОКС) (КНД)
(КНД) (КВД)
(КВД) (ФКС)
(ФКС) (ОКС)
(ОКС) (ФКС)
(ФКС)
При желании (и при наличии необходимой информации) можно таким же образом получить идентифицированную модель на других режимах (например, МФ).
Одновременно с получением индивидуальной модели СЭ двигателя происходит и частичная идентификация автоматики. СЭ «Регулятор» получает необходимую для регулирования информацию:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, ,
,  .
.
Дальнейшую настройку автоматики необходимо выполнять по различным переходным режимам (например, М-ПФ). Изменяя настройки автоматики таким образом, чтобы переходный процесс в ИМ совпадал с переходным процессом двигателя («ручной» этап идентификации). Произведя данные манипуляции – получаем «полную», «динамическую» модель двигателя и его автоматики на исследуемых режимах.
В случае, если на этапе I варьируемые величины всё таки не входят в поле допустимых значений и изменением «свободных» величин не удаётся добиться идентификации модели, следует проанализировать все результаты испытаний и принять решение о погрешности экспериментальных замеров некоторых параметров двигателя.
Подобным методом были идентифицированы ИМ двигателей. Из них 76% были идентифицированы в «автоматическом» режиме, а 20% были идентифицированы при помощи изменения (в поле допуска) «свободных» параметров, 4% двигателей данным методом идентифицировать не удалось (варьируемые величины выходят из поля допустимых значений). Погрешность ИМ относительно соответствующих параметров двигателя весьма незначительна и составляет сотые доли процента. Наибольшая погрешность идентификации – при расчёте площади критического сечения РС на режиме ПФ составила 3,25%. Возрастание погрешности при расчёте площади критического сечения РС на режиме ПФ связано с изменением коэффициента расхода сопла (при переходе на форсированные режимы), что в свою очередь вызвано повышением неравномерности потока, изменением «утечек» потока через створки сопла.
Внедрив данную методику получение индивидуальной модели двигателя в серийное производство с последующей компьютерной отладкой автоматики, можно существенно сократить время отладки двигателя и уменьшить затраты.
Список литературы
1. Ахмедзянов Д.А., Кишалов А.Е., Кривошеев И.А., Власова Е.С. Использование имитационного моделирования для оптимизации отладки форсажного контура ТРДДФ при приемо-сдаточных испытаниях. Вестник УГАТУ, Уфа, 2006.- т.7 №3. – С.136-141.
2. Ахмедзянов, Д.А. Моделирование совместной работы авиационных ГТД и элементов топливной автоматики на переходных режимах в компьютерной среде DVIGw / Д.А. Ахмедзянов, Х.С. Гумеров, И.А. Кривошеев // Изв. вузов, сер. “Авиационная техника”. - 2002. - №1. - С. 43-46.
3. Ахмедзянов Д.А., Кишалов А.Е. Информационная технология отладки динамических процессов в авиационных ГТД при приемно-сдаточных испытаниях. Известия вузов. Авиационная техника, Казань. – 2007. - №3. – С.26-31.
Работа выполнена при финансовой поддержке РФФИ.
