




Моделирование системы АИН ШИМ – АД с переменными ψr - Is во вращающейся системе координат на основе апериодических звеньев
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Авдеев Александр Сергеевич, студент;
Чернов Михаил Владимирович, студент;
Киряков Георгий Анатольевич, студент;
Габзалилов Эльвир Фиргатович, студент;
Прокопьев Константин Васильевич, студент
Российский государственный профессионально-педагогический университет
Данная работа является развитием работы [1], в которой рассматривалось одноступенчатое преобразование выходных сигналов АИН ШИМ ![]() в неподвижной системе координат, и в дальнейшем они поступали в математическую модель асинхронного двигателя. В этой работе выходные сигналы в системе
в неподвижной системе координат, и в дальнейшем они поступали в математическую модель асинхронного двигателя. В этой работе выходные сигналы в системе ![]() поступают на следующую ступень преобразования, обеспечивающую переход во вращающуюся систему
поступают на следующую ступень преобразования, обеспечивающую переход во вращающуюся систему ![]() Выходные напряжения
Выходные напряжения ![]() и
и ![]() воздействуют на математическую модель АД. Далее реакции модели в виде статорных токов
воздействуют на математическую модель АД. Далее реакции модели в виде статорных токов ![]() и
и ![]() поступают на блоки двухступенчатого обратного преобразования. Причем можно увидеть поэтапное рассмотрение в каждой из ступеней.
поступают на блоки двухступенчатого обратного преобразования. Причем можно увидеть поэтапное рассмотрение в каждой из ступеней.
Так как работа адресована студентам и представляла бы законченный модуль, в этой работе будут повторены некоторые фрагменты предыдущей статьи. Функциональная схема системы трехфазный автономный инвертор с ШИМ – асинхронный двигатель приведена на рис. 1.
В этой схеме приняты следующие обозначения:
![]() – задающие гармонические воздействия:
– задающие гармонические воздействия:
|
|
(1) |
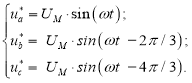
uоп – опорное напряжение, представляющее собой пилообразное, двухстороннее, симметричное напряжение с частотой модуляции значительно превышающей частоту напряжения задания. Математическая модель генератора пилообразного напряжения и его выходные сигналы даны на рис. 2 и 3;
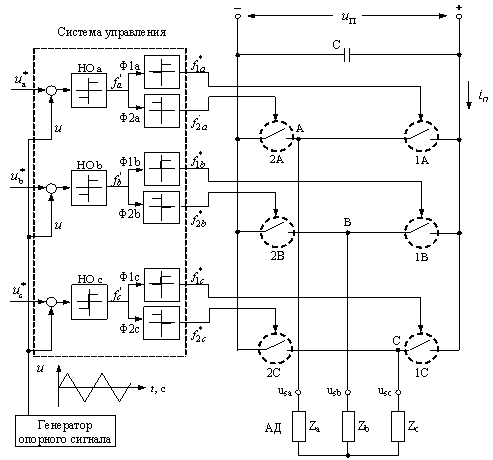
Рис. 1. Функциональная схема системы «АИН ШИМ – АД»
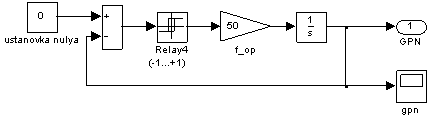
Рис. 2. Генератор пилообразного напряжения
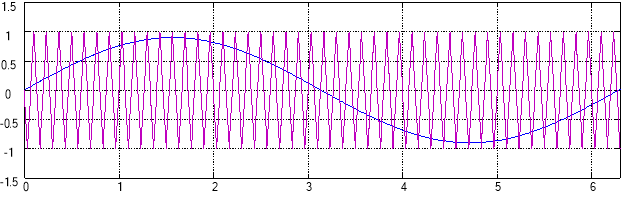
Рис. 3. Сравнение выходного сигнала генератора пилообразного напряжения
с задающим гармоническим воздействием ![]()
НОа, НОb и НОс – нуль-органы, обеспечивающие сравнение сигналов задания с опорным сигналом. Если ![]() , то выходные сигналы нуль-органов
, то выходные сигналы нуль-органов ![]() , иначе
, иначе![]() ;
;
![]() и
и![]() и
и![]() и
и![]() – дискретные выходные сигналы с формирователей, управляющих включением силовыми ключами;
– дискретные выходные сигналы с формирователей, управляющих включением силовыми ключами;
1А и 2А, 1В и 2В, 1С и 2С – силовые ключи, попеременно подключающие обмотки фаз двигателя к разноименным полюсам источника постоянного напряжения uп.
В каждом из состояний инвертора две фазы двигателя с помощью ключей соединены параллельно и подключены к источнику питания последовательно с третьей фазой. Поэтому напряжение источника питания распределяется между фазами нагрузки (в случае их симметрии) следующим образом: одна треть величины напряжения приходится на каждую из параллельно включенных фаз и две трети – на последовательно включенную фазу (таблица 1) [2].
Таблица 1
|
Номер комбинации |
Состояния схемы |
|||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
Включение ключей |
1А 2В 2С |
1А 1В 2С |
2А 1В 2С |
2А 1В 1С |
2А 2В 1С |
1А 2В 1С |
1А 1В 1С |
2А 2В 2С |
|
Схема питания обмоток АД |
|
|
|
|
|
|
|
|








Формирователи сигналов управления силовыми ключами (Ф1а и Ф2а, Ф1b и Ф2b, Ф1с и Ф2с) задают программу подключения фаз обмоток двигателя к источнику постоянного напряжения uп.
Фазное напряжение в обмотке двигателя представляет собой пятиуровневую импульсную функцию [2] со значениями:
![]()
Импульсные напряжения, подаваемые на двигатель ![]() связаны с постоянным напряжением uп и выходными сигналами нуль-органов
связаны с постоянным напряжением uп и выходными сигналами нуль-органов ![]()
![]()
![]() и
и ![]() (рис. 4) по следующей зависимости [2]:
(рис. 4) по следующей зависимости [2]:
|
|
(2) |
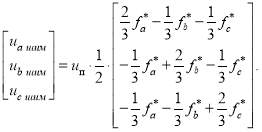
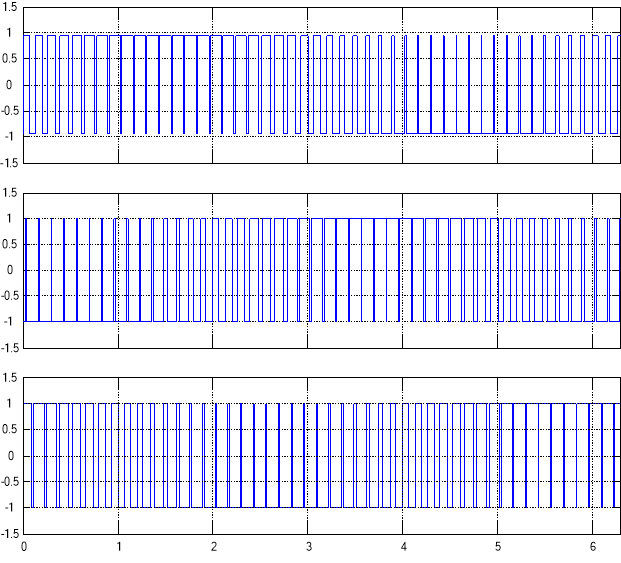
Рис. 4. Сигналы ![]() ,
,![]() и
и ![]() на выходе нуль-органов
на выходе нуль-органов ![]()
Реализация импульсных напряжений
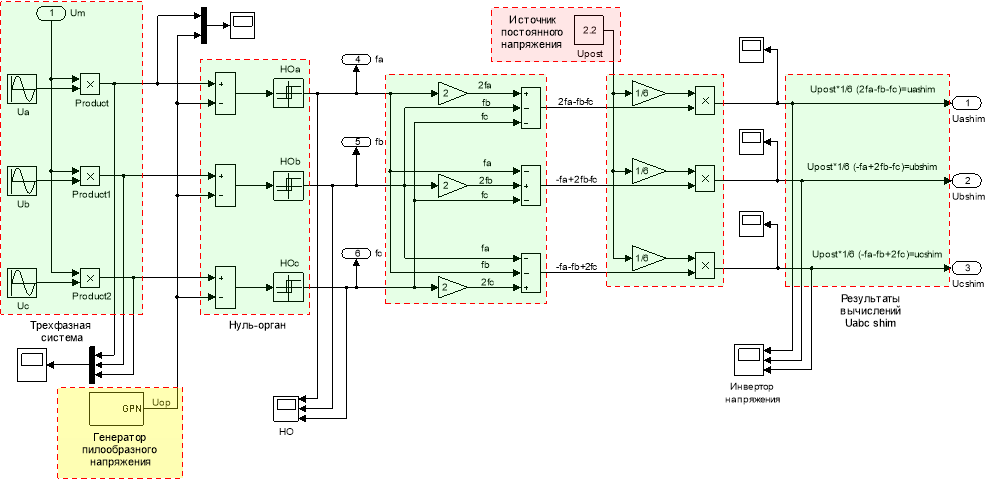
Рис. 5. Математическая модель реализации зависимости (2) в Matlab
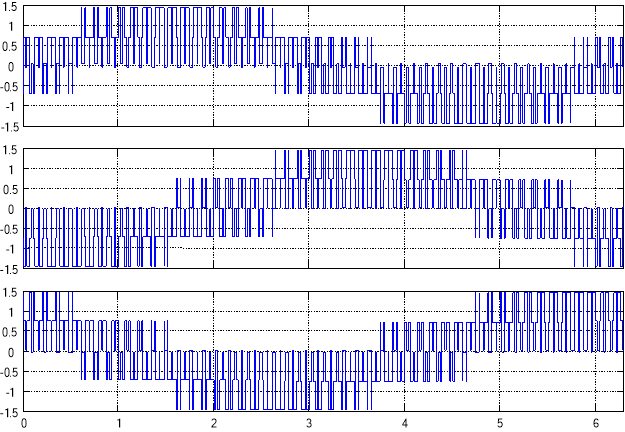
Рис. 6. Напряжения ![]() на входе первой ступени прямого преобразования координат
на входе первой ступени прямого преобразования координат
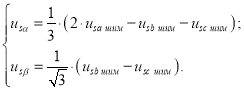
Далее эти напряжения из трехфазной системы преобразуются в импульсные двухфазные напряжения в неподвижной декартовой системе координат αβ по следующим формулам [2]:
|
|
(3) |
Математическая модель этих уравнений в Simulink-Matlab дана на рис. 7.
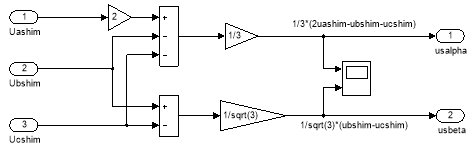
Рис. 7. Первая ступень прямого преобразования координат «abc → αβ»
Выходные сигналы этого преобразователя даны на рис. 8.
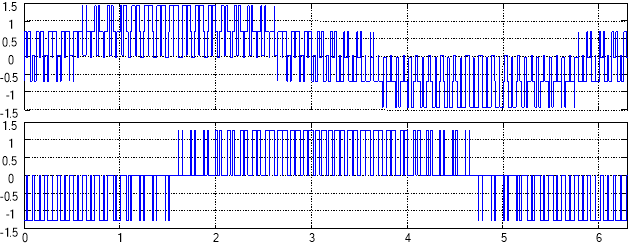
Рис. 8. Напряжения usα и usβ на выходе первой ступени прямого преобразования координат
Вторая ступень прямого преобразования (usα, usβ → usx, usy) при моделировании в Simulink реализуется на основе следующих уравнений [3]:
|
|
(4) |
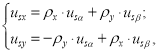
гдеρx = cos θк; ρy = sin θк.
Математическая модель второй ступени дана на рис. 9.
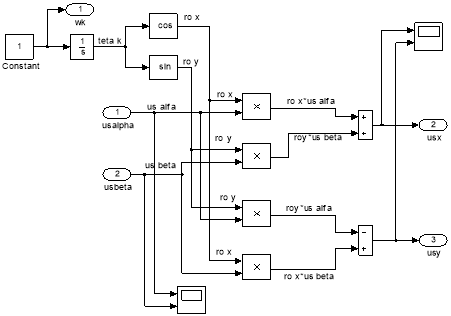
Рис. 9. Математическая модель второй ступени прямого преобразователя координат из неподвижной системы во вращающуюся систему координат (α, β → x, y)
Сигналы usx и usy в дальнейшем поступают в математическую модель двигателя (рис. 10).
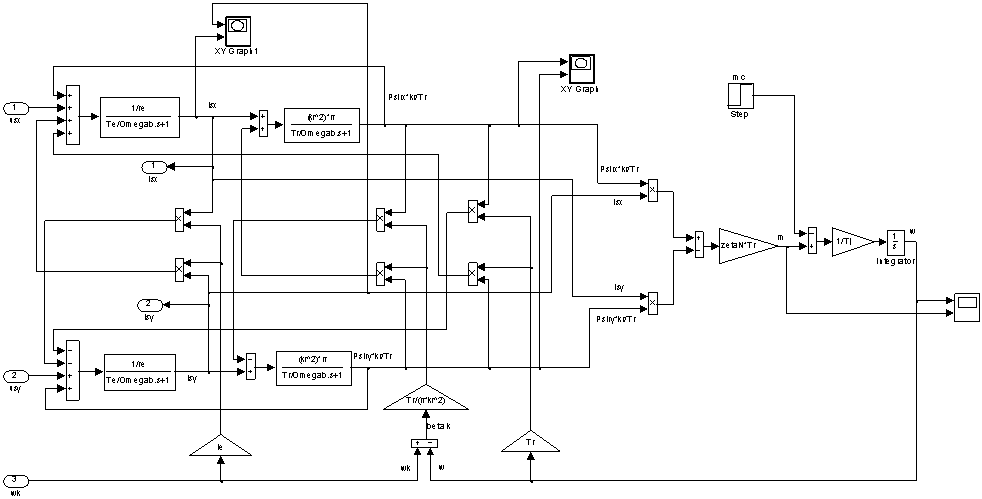
Рис. 10. Математическая модель асинхронного двигателя на основе апериодических звеньев
Расчет параметров асинхронного двигателя [1], [3]:
%Номинальные данные
PN=320000;
UsN=380;
IsN=324;
fN=50;
Omega0N=104.7;
OmegaN=102.83;
nN=0.944;
cos_phiN=0.92;
zp=3;
%Параметры Т-образной схемы замещения при номинальной частоте
Rs=0.0178;
Xs=0.118;
Rr=0.0194;
Xr=0.123;
Xm=4.552;
J=28;
%Базисные величины системы относительных единиц
Ub=sqrt(2)*UsN;
Ib=sqrt(2)*IsN;
OmegasN=2*pi*fN;
Omegab=OmegasN;
Omegarb=Omegab/zp;
Zb=Ub/Ib;
Psib=Ub/Omegab;
Lb=Psib/Ib;
kd=1.0084;
Mb=kd*PN/OmegaN;
Pb=Mb*Omegarb;
rs=Rs/Zb;
ls=Xs/Zb;
rr=Rr/Zb;
lr=Xr/Zb;
lm=Xm/Zb;
Tj=J*Omegarb/Mb;
betaN=(Omega0N-OmegaN)/Omega0N;
wN=(1-betaN);
SsN=3*UsN*IsN;
zetaN=SsN/Pb;
ks=lm/(lm+ls);
kr=lm/(lm+lr);
lbe=ls+lr+ls*lr*lm^(-1);
roN=0.9962;
rrk=roN*betaN;
alphar=kr*rr/lm;
le=kr*lbe;
re=rs+(kr^2)*rr;
Te=le/re;
Tr=(lm+lr)/rr;
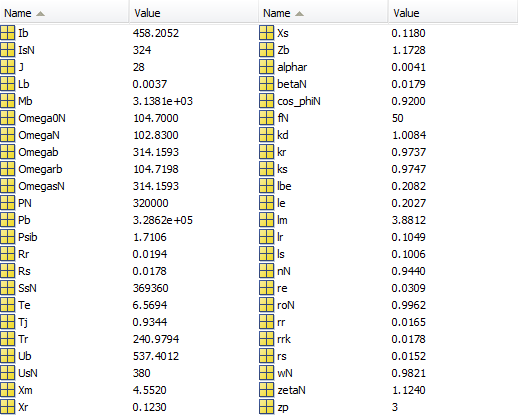
Необходимо результаты расчетов в Workspace (табл. 2) сравнить с расчетными данными, приведенными в книге [2].
Таблица 2
Далее выходные сигналы с двигателя (isx, isy) пройдут снова двухэтапное обратное преобразование. Реакции isx и isy, являющиеся результатом воздействия usx и usy на математическую модель двигателя, в дальнейшем поступают в первый блок обратного преобразования. Этот блок реализуется на основе уравнений [3]:
|
|
(5) |
Математическая модель в Simulink дана на рис. 11. Результаты моделирования токов isα и isβ даны на рис. 12.
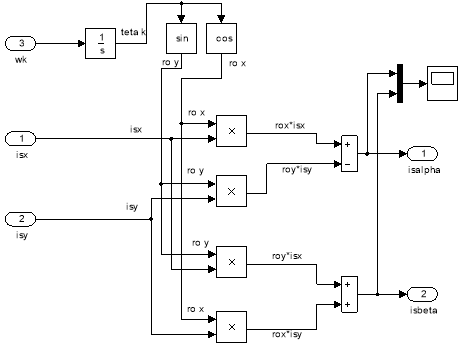
Рис. 11. Первая ступень обратного преобразования статорных токов (isx, isy → isα, isβ)
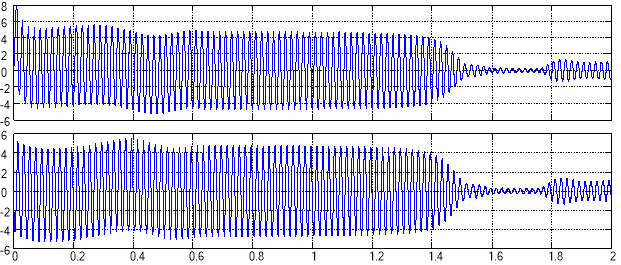
Рис. 12. Сигналы isα и isβ на выходе первой ступени обратного преобразователя координат (isx, isy → isα, isβ)
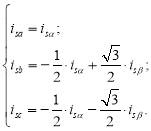
Вторая ступень обратного преобразования реализуется в Simulink на основе уравнений [3]:
|
|
(6) |
Математическая модель второй ступени обратного преобразования и результаты ![]()
![]() и
и ![]() даны на рис. 13 и 14.
даны на рис. 13 и 14.
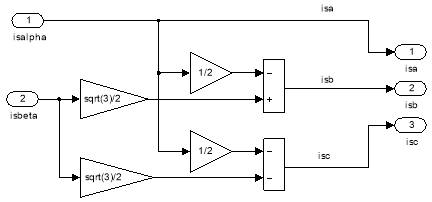
Рис. 13. Математическая модель второй ступени обратного преобразования токов в неподвижной системе координат «αβ → abc»
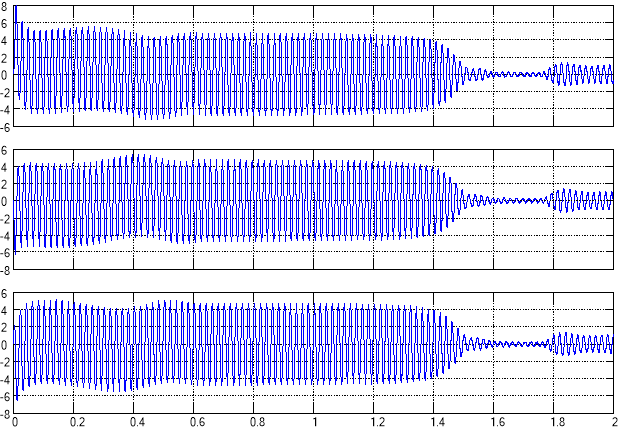
Рис. 14. Результаты моделирования isa, isb и isc на выходе второй ступени обратного преобразования в неподвижной трехфазной системе координат a, b и с
Полная схема математической модели приведена на рис. 15.
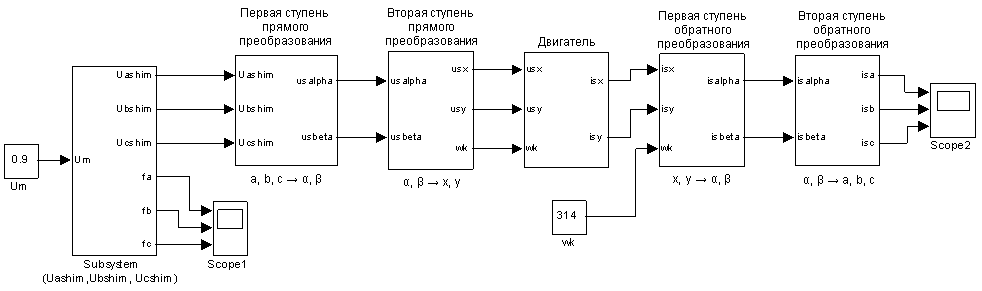
Рис. 15. Полная схема системы АИН ШИМ-АД
Результаты моделирования ω и Мэм даны на рис. 16.
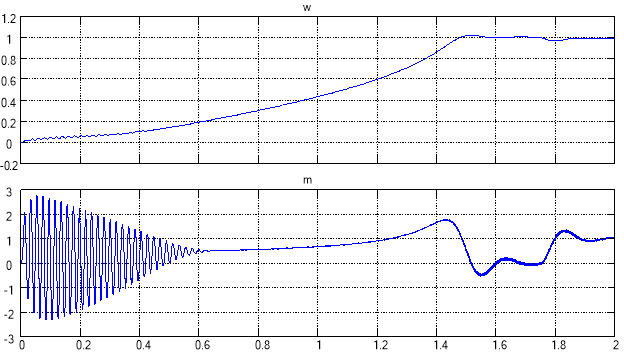
Рис. 16. Момент и скорость двигателя при питании от АИН ШИМ
Литература:
-
Емельянов А.А., Бесклеткин В.В., Авдеев А.С., Чернов М.В., Киряков Г.А., Габзалилов Э.Ф. Моделирование системы АИН ШИМ - асинхронный двигатель с переменными
 в неподвижной системе координат αβ // Молодой ученый. - 2015. - №20. - С. 5-16.
в неподвижной системе координат αβ // Молодой ученый. - 2015. - №20. - С. 5-16.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. - Екатеринбург УРО РАН, 2000. - 654 с.
