




Отличительной особенностью данного роботизированного аппарата является усложнение конструкции, путем введение третьего манипулятора и увеличение многофункциональность данной системы при разработке алгоритма работы.
Ключевые слова: манипулятор, робот, модель, структура.
Структура исследовательского комплекса состоит:
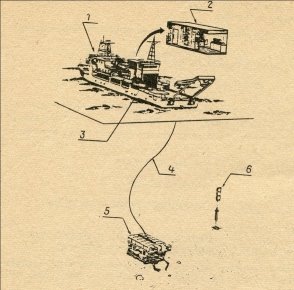
Рис. 1. Структура комплекса: 1 — надводное исследовательское судно; 2 — центр управления комплексом; 3 — надводные измерительные приборы, устройства спуска и подъема аппаратуры; 4 — оптико-волоконный кабель для передачи управляющих и информационных сигналов; 5 — необитаемый глубоководный аппарат (рис.1); 6 — импульсный повторитель радиосигналов
Основные отличия манипуляционной системы аппарата заключаются в наличии трех рук, способных взаимодействовать при выполнении операций, в применении силового очувствления в системе копирующего управления, а также в обеспечении работоспособности манипуляторов на сверхбольших глубинах.
Принципиальные различия между существующими манипуляторами обусловлены особенностями рабочей среды. Манипулятор подвержен воздействию таких факторов, как повышенное давление и вязкость среды, химическая активность, течение, перепад температур в зависимости от его назначения глубины, а также удаленность от человека-оператора на сотни и тысячи метров. Все эти факторы необходимо учитывать при проектировании исполнительной, информационной, управляющей подсистем и системы технического зрения робота, а также при выборе материалов для изготовления механических конструкций. Особую важность приобретают методы балансировки и обеспечения устойчивости аппарата при работе манипуляторов.
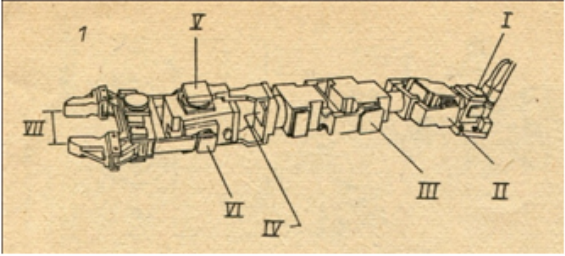
Рис. 2. Общий вид основного манипулятора
Манипуляционная система робота состоит из трех манипуляторов — основного и поддерживающих, а также подсистемы управления работой этих манипуляторов, которая включает в себя задающий манипулятор для управления операциями, рычажный механизм задания рабочих координат, контроллер задающей системы и другие элементы. Основной многозвенный манипулятор имеет антропоморфную кинематическую схему с семью степенями подвижности, каждая из которых снабжена собственным гидравлическим сервоприводом. Этот манипулятор управляется в копирующем режиме. Общий вид основного манипулятора показан на рис.2, где степени подвижности манипулятора пронумерованы. Управление осуществляется с позиционной обратной связью Степени подвижности с I по IIIманипуляторов представляют собой сервосистему одностороннего типа, а степени подвижности с IV по VII образуют двустороннюю сервосистему.
Помимо силового управления с обратной связью основной манипулятор обладает специальными функциями, такими, как «жесткая» фиксация звеньев, автоматическое свертывание и развертывание всего манипулятора и отсоединение захватного устройства. Первая из функций позволяет оператору в любой момент времени жестко зафиксировать относительное положение какого-либо звена (или всех звеньев сразу) манипуляторов. С помощью двух следующих функций оператор быстро одной командой выводит манипуляторы в заданное рабочее положение (развертывание), либо убирает их внутрь корпуса в транспортное положение (свертывание). Последняя функция предусмотрена в качестве экстренной меры для освобождения аппарата в случае, если при выполнении работы захватное устройство зацепится за внешнее препятствие и возникнет угроза безопасности всего аппарата.
Поддерживающие манипуляторы предназначены для оказания разнообразной помощи основному манипулятору. В процессе работы они подают ему инструмент и различные предметы, а также фиксируют их в заданном положении в пространстве. Поддерживающие манипуляторы обладают пятью степенями подвижности. Технические характеристики поддерживающих манипуляторов за исключением диапазонов и скоростей перемещений звеньев совпадают с характеристиками основного манипулятора. Полная аналогия наблюдается и в методах управления манипуляторами(рис.3.)
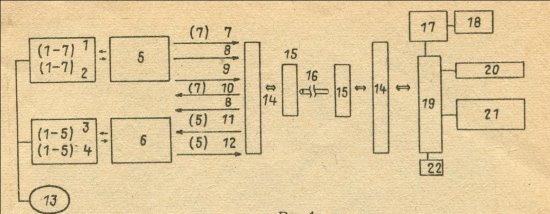
Рис. 3. Структура управления: 1 — сервораспределители основного манипулятора (1–7); 2 — потенциометры (1–7); 3 — сервораспределители поддерживающих манипуляторов; (1–5); 4 — потенциометры (1–5); 5 — устройство управления основным манипулятором; б — устройство управления поддерживающим манипулятором; 7 — позиционная обратная связь (7 сигналов); 8 — прямая связь; 9 — информация о состоянии гидросистемы основного манипулятора; 10 — позиционная команда (7 сигналов); 11 — позиционная команда (5 сигналов); 12 — позиционная обратная связь (5'сигналов); 13 — гидроцилиндры; 14 — телеметрическая система; 15 — оптико-электронный преобразователь; 16 — оптико-волоконный кабель; 17 — исполнительная система задающего манипулятора; 18 — задающий манипулятор; 19 — бортовая система управления манипуляторами; 20 — задающее координатное устройство; 21 -пульт оператора; 22 — центральный процессор.
Все управляющие воздействия вырабатываются в бортовом отсеке с помощью задающего манипулятора или рычажного координатного устройства. Эти сигналы, а также сигналы обратной связи от манипуляторов преобразуются телеметрической системой и передаются оптико-волоконной линией связи. Выработка позиционных управляющих воздействий и анализ сигналов обратной связи осуществляется центральным процессором при участии бортового управляющего устройства. На пульт оператора выводится информация о положении всех звеньев манипуляторов (в аналоговой форме). С пульта задаются специальные команды: фиксации, свертывания-развертывания и отсоединения схвата.
Манипуляционная система полностью реализована. В ходе испытаний основной манипулятор легко перемещает предметы, демонстрируя полную работоспособность при предельных скоростях по всем степеням подвижности. С помощью специально подобранных тестов должны быть проведены проверки взаимодействия основного и поддерживающих манипуляторов. Рабочие зоны каждого из манипуляторов, отслеживаются, где происходит взаимодействие (рис.4.)
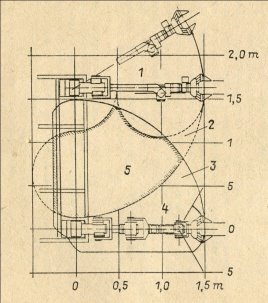
Рис. 4. Основной и поддерживающие манипулятор: 1 — поддерживающие манипуляторы; 2 — рабочая зона поддерживающего манипулятора; 3 — рабочая зона основного манипулятора; 4 — основной манипулятор; 5 — область взаимодействия.
Пользуясь информацией, поступающей от телекамер, оператор в копирующем режиме может заставить робот перенести какой-либо предмет, подобрать образец породы и поместить его в корзину, а также выполнить какую-либо сложную операцию, требующую участия нескольких манипуляторов (например, вставление болтов и закручивание гаек). Двустороннее силовое очувствление дает возможность управлять очень плавными движениями.
В результате робот может перемещать даже хрупкие стеклянные стержни и выполнять другие операции, требующие высокой точности и осторожности.
Литература:
- Поезжаева Е.В//Теория механизмов и механика систем машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2–185.
- Поезжаева Е.В//Теория механизмов и механика систем машин. Учеб. Пособия/Е. В. Поезжаева.- Пермь: Изд-во Пермского национального исследовательского политехнического университета. 2014.-400
- Поезжаева Е.В//Теория механизмов и механика систем машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.3–164.
