




В большом числе технологических процессов требуется управление объектом по двум координатам. В нашем случае объектом является прецизионный токарный станок ТПК-125, для управления которого используем шаговый электропривод. В процессе ленточного снования применяется управление объектом – регулирующим органом – по одной координате. Рассматривается вопрос реализации микропроцессорного управления приводом подачи вместо морально устаревшего.
Контроллер выполнен с использованием ЭВМ с параллельным портом, которая бы занималась выработкой управляющих импульсов, и адаптера, преобразующего сигналы ТТЛ-уровня LPT-порта ЭВМ в электрические импульсы, пригодные для питания обмоток ШД. ЭВМ в таком способе управления вносит некоторые плюсы, которые обязаны своим появлением легкостью программирования ЭВМ с помощью систем программирования.
можно запрограммировать двигатель на определённую последовательность действий, например: сделать n шагов в сторону по часовой стрелке, затем сделать m шагов против часовой стрелки и т.д.
Блок управления шаговыми двигателями предназначен для управления лазерными, координатно-сверлильными, фрезерными, токарными (двухкоординатными) и электроэрозионными станками, построенными на базе шаговых двигателей как с раздельными, так и с частично или полностью объединенными обмотками.
Блок управления (рис. 1) включает два драйвера шаговых двигателей и контроллер сопряжения драйверов. Контроллер сопряжения драйверов (КСП) строится на микроконтроллере PIC16XX, который вследствие модернизации работает от двух интерфейсов, для более устаревших машин LPT, для новых USB, поддержка ОС Windows 98, 2000, XP, 7, 8. Драйвера шаговых двигателей построены на шести силовых каналах. Сигнал, подаваемый с КСП, усиливается полевыми транзисторами VT7-VT12 (IRF640N) и резисторами R7-R12 (5,6 кОм), таким образом, он подаётся на начало соответствующей обмотки 1-6. Резисторы R7-R12 служат для ограничения выходного тока (защита обмоток от перегрева) и совместно с диодами VD1-VD6 обеспечивает глушение резонанса ротора двигателя. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются два внешних диода. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные, имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами. Выбор пониженного напряжения питания 12 В обусловлен требованием защиты двигателя от перегрева.
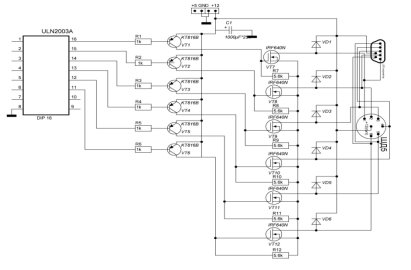
Рис. 1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3
- Диапазон регулирования скорости шагового двигателя – 6 – 12000 ш/с;
- Напряжение питания – 5 – 12 В;
- Максимальный выходной ток – 3 А.
Системы управления электроприводом, основанные на микрошаговом режиме, позволяют менять ток в фазах небольшими шагами, обеспечивая таким образом разделение половинного шага на еще меньшие микрошаги, а также дает возможность использовать наношаги. Если включены одновременно две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другой точке. Эту точку определяют соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага.
Литература:
- Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов: учебник для вузов / О.П. Михайлов. М.: Машиностроение, 1990. 304 с.
- Гаврилов А.И. Микропроцессорное управление шаговым двигателем / А.И. Гаврилов, Ю.С. Сизов // Автоматизация и управление в машино- и приборостроении: сб. науч. тр. Саратов: СГТУ, 2013. С. 60-64.
- www.stepmotors.com
